
So Beegee our max payload size is 24 bytes, does a payload of 17 on the helium console for example stand for 17 bytes?
Yes it does. But you should know how many bytes your payload size is, your app creates it.
/**
* @file Wind_Speed_Monitoring.ino
* @author rakwireless.com
* @brief This sketch demonstrate reading a data from a wind speed sensor
* and send the data to lora gateway.
* @version 0.1
* @date 2020-07-28
* @copyright Copyright (c) 2020
*/
#include <Arduino.h>
#include <ArduinoModbus.h> //Click here to get the library: http://librarymanager/All#ArduinoModbus
#include <LoRaWan-RAK4630.h> // Click here to get the library: http://librarymanager/All#SX126x
#include <SPI.h>
// Check if the board has an LED port defined
#ifndef LED_BUILTIN
#define LED_BUILTIN 35
#endif
#ifndef LED_BUILTIN2
#define LED_BUILTIN2 36
#endif
bool doOTAA = true; // OTAA is used by default.
#define SCHED_MAX_EVENT_DATA_SIZE APP_TIMER_SCHED_EVENT_DATA_SIZE /**< Maximum size of scheduler events. */
#define SCHED_QUEUE_SIZE 60 /**< Maximum number of events in the scheduler queue. */
#define LORAWAN_DATERATE DR_0
#define LORAWAN_TX_POWER TX_POWER_0
#define JOINREQ_NBTRIALS 3 /**< Number of trials for the join request. */
DeviceClass_t g_CurrentClass = CLASS_A;
LoRaMacRegion_t g_CurrentRegion = LORAMAC_REGION_EU868; /* Region:EU868*/
lmh_confirm g_CurrentConfirm = LMH_CONFIRMED_MSG;
uint8_t g_AppPort = LORAWAN_APP_PORT;
/**@brief Structure containing LoRaWan parameters, needed for lmh_init()
*/
static lmh_param_t g_lora_param_init = {
LORAWAN_ADR_ON,
LORAWAN_DATERATE,
LORAWAN_PUBLIC_NETWORK,
JOINREQ_NBTRIALS,
LORAWAN_TX_POWER,
LORAWAN_DUTYCYCLE_OFF
};
// Foward declaration
static void lorawan_has_joined_handler(void);
static void lorawan_join_failed_handler(void);
static void lorawan_rx_handler(lmh_app_data_t *app_data);
static void lorawan_confirm_class_handler(DeviceClass_t Class);
static void send_lora_frame(void);
/**@brief Structure containing LoRaWan callback functions, needed for lmh_init()
*/
static lmh_callback_t g_lora_callbacks = {
BoardGetBatteryLevel,
BoardGetUniqueId,
BoardGetRandomSeed,
lorawan_rx_handler,
lorawan_has_joined_handler,
lorawan_confirm_class_handler,
lorawan_join_failed_handler
};
//OTAA keys !!!! KEYS ARE MSB !!!!
uint8_t nodeDeviceEUI[8] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x33, 0x33};
uint8_t nodeAppEUI[8] = {0xB8, 0x27, 0xEB, 0xFF, 0xFE, 0x39, 0x00, 0x00};
uint8_t nodeAppKey[16] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88};
// ABP keys
uint32_t nodeDevAddr = 0x260116F8;
uint8_t nodeNwsKey[16] = {0x7E, 0xAC, 0xE2, 0x55, 0xB8, 0xA5, 0xE2, 0x69, 0x91, 0x51, 0x96, 0x06, 0x47, 0x56, 0x9D, 0x23};
uint8_t nodeAppsKey[16] = {0xFB, 0xAC, 0xB6, 0x47, 0xF3, 0x58, 0x45, 0xC7, 0x50, 0x7D, 0xBF, 0x16, 0x8B, 0xA8, 0xC1, 0x7C};
// Private defination
#define LORAWAN_APP_DATA_BUFF_SIZE 64 /**< buffer size of the data to be transmitted. */
#define LORAWAN_APP_INTERVAL 20000 /**< Defines for user timer, the application data transmission interval. 20s, value in [ms]. */
static uint8_t g_m_lora_app_data_buffer[LORAWAN_APP_DATA_BUFF_SIZE]; //< Lora user application data buffer.
static lmh_app_data_t g_m_lora_app_data = {g_m_lora_app_data_buffer, 0, 0, 0, 0}; //< Lora user application data structure.
TimerEvent_t g_appTimer;
static uint32_t timers_init(void);
static uint32_t g_count = 0;
static uint32_t g_count_fail = 0;
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
// Initialize LoRa chip.
lora_rak4630_init();
// Initialize Serial for debug output
time_t timeout = millis();
Serial.begin(115200);
while (!Serial)
{
if ((millis() - timeout) < 5000)
{
delay(100);
}
else
{
break;
}
}
Serial.println("=====================================");
Serial.println("Welcome to RAK4630 LoRaWan!!!");
if (doOTAA)
{
Serial.println("Type: OTAA");
}
else
{
Serial.println("Type: ABP");
}
switch (g_CurrentRegion)
{
case LORAMAC_REGION_AS923:
Serial.println("Region: AS923");
break;
case LORAMAC_REGION_AU915:
Serial.println("Region: AU915");
break;
case LORAMAC_REGION_CN470:
Serial.println("Region: CN470");
break;
case LORAMAC_REGION_EU433:
Serial.println("Region: EU433");
break;
case LORAMAC_REGION_IN865:
Serial.println("Region: IN865");
break;
case LORAMAC_REGION_EU868:
Serial.println("Region: EU868");
break;
case LORAMAC_REGION_KR920:
Serial.println("Region: KR920");
break;
case LORAMAC_REGION_US915:
Serial.println("Region: US915");
break;
}
Serial.println("=====================================");
if (!ModbusRTUClient.begin(9600))
{
Serial.println("Failed to start Modbus RTU Client!");
while (1)
;
}
Scheduler.startLoop(loop2);
//creat a user timer to send data to server period
uint32_t err_code;
err_code = timers_init();
if (err_code != 0)
{
Serial.printf("timers_init failed - %d\n", err_code);
return;
}
// Setup the EUIs and Keys
if (doOTAA)
{
lmh_setDevEui(nodeDeviceEUI);
lmh_setAppEui(nodeAppEUI);
lmh_setAppKey(nodeAppKey);
}
else
{
lmh_setNwkSKey(nodeNwsKey);
lmh_setAppSKey(nodeAppsKey);
lmh_setDevAddr(nodeDevAddr);
}
// Initialize LoRaWan
err_code = lmh_init(&g_lora_callbacks, g_lora_param_init, doOTAA, g_CurrentClass, g_CurrentRegion);
if (err_code != 0)
{
Serial.printf("lmh_init failed - %d\n", err_code);
return;
}
// Start Join procedure
lmh_join();
}
void loop2()
{
uint32_t i = 0;
short raw_speed;
raw_speed = get_speed();
g_m_lora_app_data.port = g_AppPort;
g_m_lora_app_data.buffer[i++] = 0x0a;
g_m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
g_m_lora_app_data.buffer[i++] = raw_speed & 0x00FF;
g_m_lora_app_data.buffsize = i;
delay(10000);
yield();
}
void loop()
{
// Put your application tasks here, like reading of sensors,
// Controlling actuators and/or other functions.
}
/**@brief LoRa function for handling HasJoined event.
*/
void lorawan_has_joined_handler(void)
{
Serial.println("OTAA Mode, Network Joined!");
lmh_error_status ret = lmh_class_request(g_CurrentClass);
if (ret == LMH_SUCCESS)
{
delay(1000);
TimerSetValue(&g_appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&g_appTimer);
}
}
/**@brief LoRa function for handling OTAA join failed
*/
static void lorawan_join_failed_handler(void)
{
Serial.println("OTAA join failed!");
Serial.println("Check your EUI's and Keys's!");
Serial.println("Check if a Gateway is in range!");
}
/**@brief Function for handling LoRaWan received data from Gateway
*
* @param[in] app_data Pointer to rx data
*/
void lorawan_rx_handler(lmh_app_data_t *app_data)
{
Serial.printf("LoRa Packet received on port %d, size:%d, rssi:%d, snr:%d, data:%s\n",
app_data->port, app_data->buffsize, app_data->rssi, app_data->snr, app_data->buffer);
}
void lorawan_confirm_class_handler(DeviceClass_t Class)
{
Serial.printf("switch to class %c done\n", "ABC"[Class]);
// Informs the server that switch has occurred ASAP
g_m_lora_app_data.buffsize = 0;
g_m_lora_app_data.port = g_AppPort;
lmh_send(&g_m_lora_app_data, g_CurrentConfirm);
}
short get_speed(void)
{
short rawspeed;
float speed;
/* RS485 Power On */
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, HIGH);
delay(100);
/* RS485 Power On */
if (!ModbusRTUClient.requestFrom(1, HOLDING_REGISTERS, 0x0016, 1))
{
Serial.print("failed to read registers! ");
Serial.println(ModbusRTUClient.lastError());
}
else
{
// If the request succeeds, the sensor sends the readings, that are
// stored in the holding registers. The read() method can be used to
// get the raw pH values.
rawspeed = ModbusRTUClient.read();
// To get the ph reading as a percentage, divide the raw value by 10.0.
speed = rawspeed / 10.0;
Serial.printf("-------speed------ = %f\n", speed);
}
/* RS485 Power Off */
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, LOW);
delay(100);
/* RS485 Power Off */
return rawspeed;
}
void send_lora_frame(void)
{
if (lmh_join_status_get() != LMH_SET)
{
//Not joined, try again later
return;
}
lmh_error_status error = lmh_send(&g_m_lora_app_data, g_CurrentConfirm);
if (error == LMH_SUCCESS)
{
g_count++;
Serial.printf("lmh_send ok count %d\n", g_count);
}
else
{
g_count_fail++;
Serial.printf("lmh_send fail count %d\n", g_count_fail);
}
}
/**@brief Function for handling user timerout event.
*/
void tx_lora_periodic_handler(void)
{
TimerSetValue(&g_appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&g_appTimer);
Serial.println("Sending frame now...");
send_lora_frame();
}
/**@brief Function for the Timer initialization.
*
* @details Initializes the timer module. This creates and starts application timers.
*/
uint32_t timers_init(void)
{
TimerInit(&g_appTimer, tx_lora_periodic_handler);
return 0;
}
What are the bare minimal parts of this wind speed code that I need to pull out and insert into my environment code to get this project to run correctly? This is my first time merging two parts of Arduino code like this, so I apologize if I am asking a basic question in advanced!
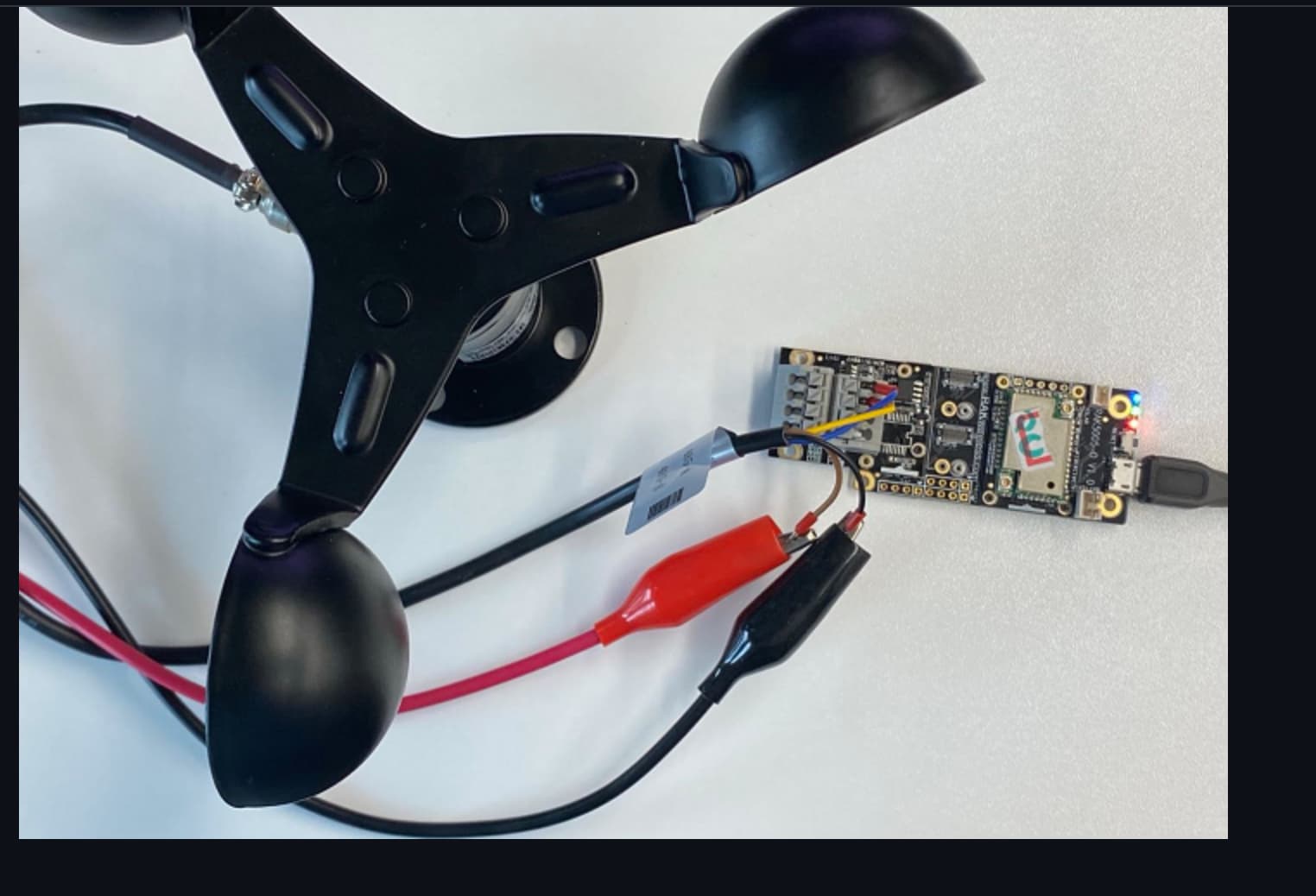
Also the wind speed monitoring device appears to have some cables here in your example that do not seem to come with the link you gave me carlowan https://www.lcsc.com/product-detail/Specialized-Sensors_Ubibot-JXBS-3001-FS_C843317.html It almost looks like an auxiliary or something? I just know it doesn’t look like this example picture. What cables do I need to buy too so that I will have everything I need to make this work?
Hi @a1projects ,
It is likely that it is just the connector. You can strip it to get the 4 wires. If you’ll look at the photo, it is a 4-pin Aviation Connector.
Here is the english translated datasheet. I found it by few searches in google https://www.ubibot.com/wp-content/uploads/dlm_uploads/2020/11/Wind-Speed-Sensor-210225.pdf.
LCSC only has 2 pcs remainging in stock. You can also purchase here RS485 Sensors and Accessories matched with UbiBot Devices. in case LCSC got out of stock.
Carl, I was able to order the LCSC before it went out of stock! It will be here in a week. I also took your team’s advice and purchased this RAK Gateway since I am still having connecting issues on helium! Hopefully that will help me figure out what the issue is. Ok great, I just wanted to be prepared so that by the time it is here I can get straight to work
Beegee or Carl, do either of you have any insight on how to actually put the two examples together?
hi @a1projects ,
I don’t have any exact code and I do not have the wind speed sensor but I’ll share you some general ideas.
First of all, you need to gather all sensor data. This step can be inside a loop function. In windspeed example sketch, it uses Scheduler (check loop2() function) to ensure that the code will continuously run and won’t stuck up in getting the data in the code even it has 10seconds delay. In the Environment Monitor, getting data values is inside the send_lora_frame function because getting that data won’t take really long. It is very important that your sketch is looping continuously, you CAN’T just pause anywhere in the code or put huge delays. If needed delays like the 10seconds delay on the windspeed sensor, you need to use the Scheduler functionality or use RTOS or use simple millis(). But for this, we use Scheduler. More info of that here https://www.arduino.cc/en/Reference/Scheduler
The two examples uses different naming convention in payload buffer so you need to choose 1 what to follow. m_lora_app_data or g_m_lora_app_data is ok but you must only use one.
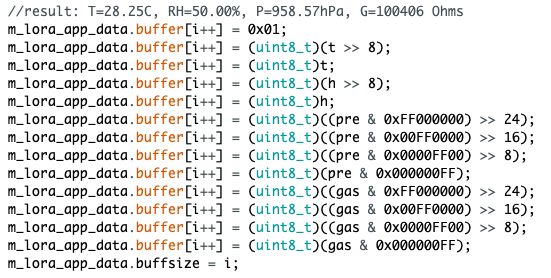
Environment example:
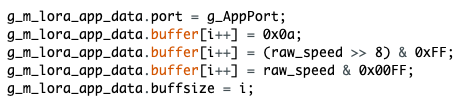
Windspeed example:
Let say I chose to use the environmental sensos example as my base code, then I can add the payload for the windsensor and it will look like this.
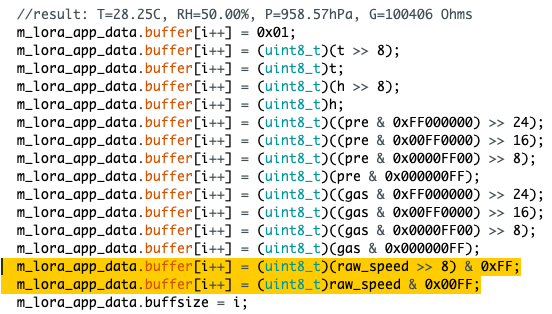
You see that I used m_lora_app.data then removed the port because it is already in the environmental sensor sketch example. Also I removed the initial dummy byte g_m_lora_app_data.buffer[i++] = 0x0a; used for the identity of the windspeed payload because that is not really needed.
But of course, you still need to copy the loop2() and get_speed() as well together with the necessary variables from the windspeed example sketch to the environment sensor sketch. I hope this generic ideas will be helpful.
You’re referring to this part right?
void loop2()
{
uint32_t i = 0;
short raw_speed;
raw_speed = get_speed();
g_m_lora_app_data.port = g_AppPort;
g_m_lora_app_data.buffer[i++] = 0x0a;
g_m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
g_m_lora_app_data.buffer[i++] = raw_speed & 0x00FF;
g_m_lora_app_data.buffsize = i;
delay(10000);
yield();
}
Do I need to remove this part like you did above? g_m_lora_app_data.buffer[i++] = 0x0a;
also does it matter where this code above goes in the environment code? Can I put it right above the code you just showed me in this example? Is there anything else from the code that needs to be pulled from the windspeed? I followed your format (moving windspeed to the environment example). Thanks for the visual examples, very helpful!
Please get the loop2() and get_speed function as well as the line Scheduler.startLoop(loop2); on the wind speed example.
Then just make raw_speed variable global to make things simple. You can now get the raw_speed value and put it on the m_lora_app_data.buffer section like what I did above.
Also, you need to include modbus library
#include <ArduinoModbus.h>
and SPI header file
#include <SPI.h>
You must have the Modbus initialization as well in void setup.
if (!ModbusRTUClient.begin(9600))
{
Serial.println("Failed to start Modbus RTU Client!");
while (1)
;
}`
Alright so I have tried piecing all of this together and am having some issues
/**
@file Environment_Monitoring.ino
@author rakwireless.com
@brief This sketch demonstrate how to get environment data from BME680
and send the data to lora gateway.
@version 0.1
@date 2020-07-28
@copyright Copyright (c) 2020
**/
#include <Arduino.h>
#include <LoRaWan-RAK4630.h> // Click to install library: http://librarymanager/ALL#SX126x-Arduino
#include <SPI.h>
#include <ArduinoModbus.h>
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BME680.h> // Click to install library: http://librarymanager/All#Adafruit_BME680
#include <U8g2lib.h> // Click to install library: http://librarymanager/ALL#u8g2
U8G2_SSD1306_128X64_NONAME_F_HW_I2C u8g2(U8G2_R0);
Adafruit_BME680 bme;
// RAK4630 supply two LED
#ifndef LED_BUILTIN
#define LED_BUILTIN 35
#endif
#ifndef LED_BUILTIN2
#define LED_BUILTIN2 36
#endif
bool doOTAA = true; // OTAA is used by default.
#define SCHED_MAX_EVENT_DATA_SIZE APP_TIMER_SCHED_EVENT_DATA_SIZE /**< Maximum size of scheduler events. */
#define SCHED_QUEUE_SIZE 60 /**< Maximum number of events in the scheduler queue. */
#define LORAWAN_DATERATE DR_3 /*LoRaMac datarates definition, from DR_0 to DR_5*/
#define LORAWAN_TX_POWER TX_POWER_0 /*LoRaMac tx power definition, from TX_POWER_0 to TX_POWER_15*/
#define JOINREQ_NBTRIALS 5 /**< Number of trials for the join request. */
DeviceClass_t g_CurrentClass = CLASS_A; /* class definition*/
LoRaMacRegion_t g_CurrentRegion = LORAMAC_REGION_EU868; /* Region:EU868*/
lmh_confirm g_CurrentConfirm = LMH_CONFIRMED_MSG; /* confirm/unconfirm packet definition*/
uint8_t gAppPort = LORAWAN_APP_PORT; /* data port*/
/**@brief Structure containing LoRaWan parameters, needed for lmh_init()
*/
static lmh_param_t g_lora_param_init = {LORAWAN_ADR_OFF, LORAWAN_DATERATE, LORAWAN_PUBLIC_NETWORK, JOINREQ_NBTRIALS, LORAWAN_TX_POWER, LORAWAN_DUTYCYCLE_OFF};
// Foward declaration
static void lorawan_has_joined_handler(void);
void lorawan_join_fail(void);
static void lorawan_rx_handler(lmh_app_data_t *app_data);
static void lorawan_confirm_class_handler(DeviceClass_t Class);
static void send_lora_frame(void);
/**@brief Structure containing LoRaWan callback functions, needed for lmh_init()
*/
static lmh_callback_t g_lora_callbacks = {BoardGetBatteryLevel, BoardGetUniqueId, BoardGetRandomSeed,
lorawan_rx_handler, lorawan_has_joined_handler, lorawan_confirm_class_handler, lorawan_join_fail
};
//OTAA keys !!!! KEYS ARE MSB !!!!
uint8_t nodeDeviceEUI[8] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x33, 0x33};
uint8_t nodeAppEUI[8] = {0xB8, 0x27, 0xEB, 0xFF, 0xFE, 0x39, 0x00, 0x00};
uint8_t nodeAppKey[16] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88};
// ABP keys
uint32_t nodeDevAddr = 0x260116F8;
uint8_t nodeNwsKey[16] = {0x7E, 0xAC, 0xE2, 0x55, 0xB8, 0xA5, 0xE2, 0x69, 0x91, 0x51, 0x96, 0x06, 0x47, 0x56, 0x9D, 0x23};
uint8_t nodeAppsKey[16] = {0xFB, 0xAC, 0xB6, 0x47, 0xF3, 0x58, 0x45, 0xC7, 0x50, 0x7D, 0xBF, 0x16, 0x8B, 0xA8, 0xC1, 0x7C};
// Private defination
#define LORAWAN_APP_DATA_BUFF_SIZE 64 /**< buffer size of the data to be transmitted. */
#define LORAWAN_APP_INTERVAL 20000 /**< Defines for user timer, the application data transmission interval. 20s, value in [ms]. */
static uint8_t m_lora_app_data_buffer[LORAWAN_APP_DATA_BUFF_SIZE]; //< Lora user application data buffer.
static lmh_app_data_t m_lora_app_data = {m_lora_app_data_buffer, 0, 0, 0, 0}; //< Lora user application data structure.
TimerEvent_t appTimer;
static uint32_t timers_init(void);
static uint32_t count = 0;
static uint32_t count_fail = 0;
void setup()
{
// Initialize the built in LED
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
// Initialize Serial for debug output
Serial.begin(115200);
if (!ModbusRTUClient.begin(9600))
{
Serial.println("Failed to start Modbus RTU Client!");
while (1)
;
}
time_t serial_timeout = millis();
// On nRF52840 the USB serial is not available immediately
while (!Serial)
{
if ((millis() - serial_timeout) < 5000)
{
delay(100);
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
}
else
{
break;
}
}
Serial.println("=====================================");
Serial.println("Welcome to RAK4630 LoRaWan!!!");
if (doOTAA)
{
Serial.println("Type: OTAA");
}
else
{
Serial.println("Type: ABP");
}
switch (g_CurrentRegion)
{
case LORAMAC_REGION_AS923:
Serial.println("Region: AS923");
break;
case LORAMAC_REGION_AU915:
Serial.println("Region: AU915");
break;
case LORAMAC_REGION_CN470:
Serial.println("Region: CN470");
break;
case LORAMAC_REGION_EU433:
Serial.println("Region: EU433");
break;
case LORAMAC_REGION_IN865:
Serial.println("Region: IN865");
break;
case LORAMAC_REGION_EU868:
Serial.println("Region: EU868");
break;
case LORAMAC_REGION_KR920:
Serial.println("Region: KR920");
break;
case LORAMAC_REGION_US915:
Serial.println("Region: US915");
break;
}
Serial.println("=====================================");
// Initialize LoRa chip.
lora_rak4630_init();
/* bme680 init */
init_bme680();
u8g2.begin();
//creat a user timer to send data to server period
uint32_t err_code;
err_code = timers_init();
if (err_code != 0)
{
Serial.printf("timers_init failed - %d\n", err_code);
return;
}
// Setup the EUIs and Keys
if (doOTAA)
{
lmh_setDevEui(nodeDeviceEUI);
lmh_setAppEui(nodeAppEUI);
lmh_setAppKey(nodeAppKey);
}
else
{
lmh_setNwkSKey(nodeNwsKey);
lmh_setAppSKey(nodeAppsKey);
lmh_setDevAddr(nodeDevAddr);
}
// Initialize LoRaWan
err_code = lmh_init(&g_lora_callbacks, g_lora_param_init, doOTAA, g_CurrentClass, g_CurrentRegion);
if (err_code != 0)
{
Serial.printf("lmh_init failed - %d\n", err_code);
return;
}
// Start Join procedure
u8g2.clearBuffer(); // clear the internal memory
u8g2.setFont(u8g2_font_ncenB10_tr); // choose a suitable font
u8g2.drawStr(20, 39, "Joining ...");
u8g2.sendBuffer(); // transfer internal memory to the display
lmh_join();
}
void loop()
{
// Put your application tasks here, like reading of sensors,
// Controlling actuators and/or other functions.
}
/**@brief LoRa function for failed Join event
*/
void lorawan_join_fail(void)
{
Serial.println("OTAA join failed!");
}
/**@brief LoRa function for handling HasJoined event.
*/
void lorawan_has_joined_handler(void)
{
Serial.println("OTAA Mode, Network Joined!");
u8g2.clearBuffer(); // clear the internal memory
u8g2.setFont(u8g2_font_ncenB10_tr); // choose a suitable font
u8g2.drawStr(20, 39, "Joined");
u8g2.sendBuffer(); // transfer internal memory to the display
//delay(2000);
lmh_error_status ret = lmh_class_request(g_CurrentClass);
if (ret == LMH_SUCCESS)
{
delay(1000);
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
}
}
/**@brief Function for handling LoRaWan received data from Gateway
@param[in] app_data Pointer to rx data
*/
void lorawan_rx_handler(lmh_app_data_t *app_data)
{
Serial.printf("LoRa Packet received on port %d, size:%d, rssi:%d, snr:%d, data:%s\n",
app_data->port, app_data->buffsize, app_data->rssi, app_data->snr, app_data->buffer);
}
void lorawan_confirm_class_handler(DeviceClass_t Class)
{
Serial.printf("switch to class %c done\n", "ABC"[Class]);
// Informs the server that switch has occurred ASAP
m_lora_app_data.buffsize = 0;
m_lora_app_data.port = gAppPort;
lmh_send(&m_lora_app_data, g_CurrentConfirm);
}
void send_lora_frame(void)
{
if (lmh_join_status_get() != LMH_SET)
{
//Not joined, try again later
return;
}
if (!bme.performReading()) {
return;
}
bme680_get();
lmh_error_status error = lmh_send(&m_lora_app_data, g_CurrentConfirm);
if (error == LMH_SUCCESS)
{
count++;
Serial.printf("lmh_send ok count %d\n", count);
}
else
{
count_fail++;
Serial.printf("lmh_send fail count %d\n", count_fail);
}
}
/**@brief Function for handling user timerout event.
*/
void tx_lora_periodic_handler(void)
{
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
Serial.println("Sending frame now...");
send_lora_frame();
}
/**@brief Function for the Timer initialization.
@details Initializes the timer module. This creates and starts application timers.
*/
uint32_t timers_init(void)
{
TimerInit(&appTimer, tx_lora_periodic_handler);
return 0;
}
void init_bme680(void)
{
Wire.begin();
if (!bme.begin(0x76)) {
Serial.println("Could not find a valid BME680 sensor, check wiring!");
return;
}
// Set up oversampling and filter initialization
bme.setTemperatureOversampling(BME680_OS_8X);
bme.setHumidityOversampling(BME680_OS_2X);
bme.setPressureOversampling(BME680_OS_4X);
bme.setIIRFilterSize(BME680_FILTER_SIZE_3);
bme.setGasHeater(320, 150); // 320*C for 150 ms
}
String data = "";
void bme680_get()
{
char oled_data[32] = {0};
Serial.print("result: ");
uint32_t i = 0;
memset(m_lora_app_data.buffer, 0, LORAWAN_APP_DATA_BUFF_SIZE);
m_lora_app_data.port = gAppPort;
double temp = bme.temperature;
double pres = bme.pressure / 100.0;
double hum = bme.humidity;
uint32_t gas = bme.gas_resistance;
data = "Tem:" + String(temp) + "C " + "Hum:" + String(hum) + "% " + "Pres:" + String(pres) + "KPa " + "Gas:" + String(gas) + "Ohms";
Serial.println(data);
// display bme680 sensor data on OLED
u8g2.clearBuffer(); // clear the internal memory
u8g2.setFont(u8g2_font_ncenB10_tr); // choose a suitable font
memset(oled_data, 0, sizeof(oled_data));
sprintf(oled_data, "T=%.2fC", temp);
u8g2.drawStr(3, 15, oled_data);
memset(oled_data, 0, sizeof(oled_data));
snprintf(oled_data, 64, "RH=%.2f%%", hum);
u8g2.drawStr(3, 30, oled_data);
memset(oled_data, 0, sizeof(oled_data));
sprintf(oled_data, "P=%.2fhPa", pres);
u8g2.drawStr(3, 45, oled_data);
memset(oled_data, 0, sizeof(oled_data));
sprintf(oled_data, "G=%dOhms", gas);
u8g2.drawStr(3, 60, oled_data);
u8g2.sendBuffer(); // transfer internal memory to the display
uint16_t t = temp * 100;
uint16_t h = hum * 100;
uint32_t pre = pres * 100;
Scheduler.startLoop(loop2);
void loop2()
{
uint32_t i = 0;
short raw_speed;
raw_speed = get_speed();
g_m_lora_app_data.port = g_AppPort;
g_m_lora_app_data.buffer[i++] = 0x0a;
g_m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
g_m_lora_app_data.buffer[i++] = raw_speed & 0x00FF;
g_m_lora_app_data.buffsize = i;
delay(10000);
yield();
}
//result: T=28.25C, RH=50.00%, P=958.57hPa, G=100406 Ohms
m_lora_app_data.buffer[i++] = 0x01;
m_lora_app_data.buffer[i++] = (uint8_t)(t >> 8);
m_lora_app_data.buffer[i++] = (uint8_t)t;
m_lora_app_data.buffer[i++] = (uint8_t)(h >> 8);
m_lora_app_data.buffer[i++] = (uint8_t)h;
m_lora_app_data.buffer[i++] = (uint8_t)((pre & 0xFF000000) >> 24);
m_lora_app_data.buffer[i++] = (uint8_t)((pre & 0x00FF0000) >> 16);
m_lora_app_data.buffer[i++] = (uint8_t)((pre & 0x0000FF00) >> 8);
m_lora_app_data.buffer[i++] = (uint8_t)(pre & 0x000000FF);
m_lora_app_data.buffer[i++] = (uint8_t)((gas & 0xFF000000) >> 24);
m_lora_app_data.buffer[i++] = (uint8_t)((gas & 0x00FF0000) >> 16);
m_lora_app_data.buffer[i++] = (uint8_t)((gas & 0x0000FF00) >> 8);
m_lora_app_data.buffer[i++] = (uint8_t)(gas & 0x000000FF);
m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
m_lora_app_data.buffer[i++] = raw_speed & 0x00FF;
m_lora_app_data.buffsize = i;
}
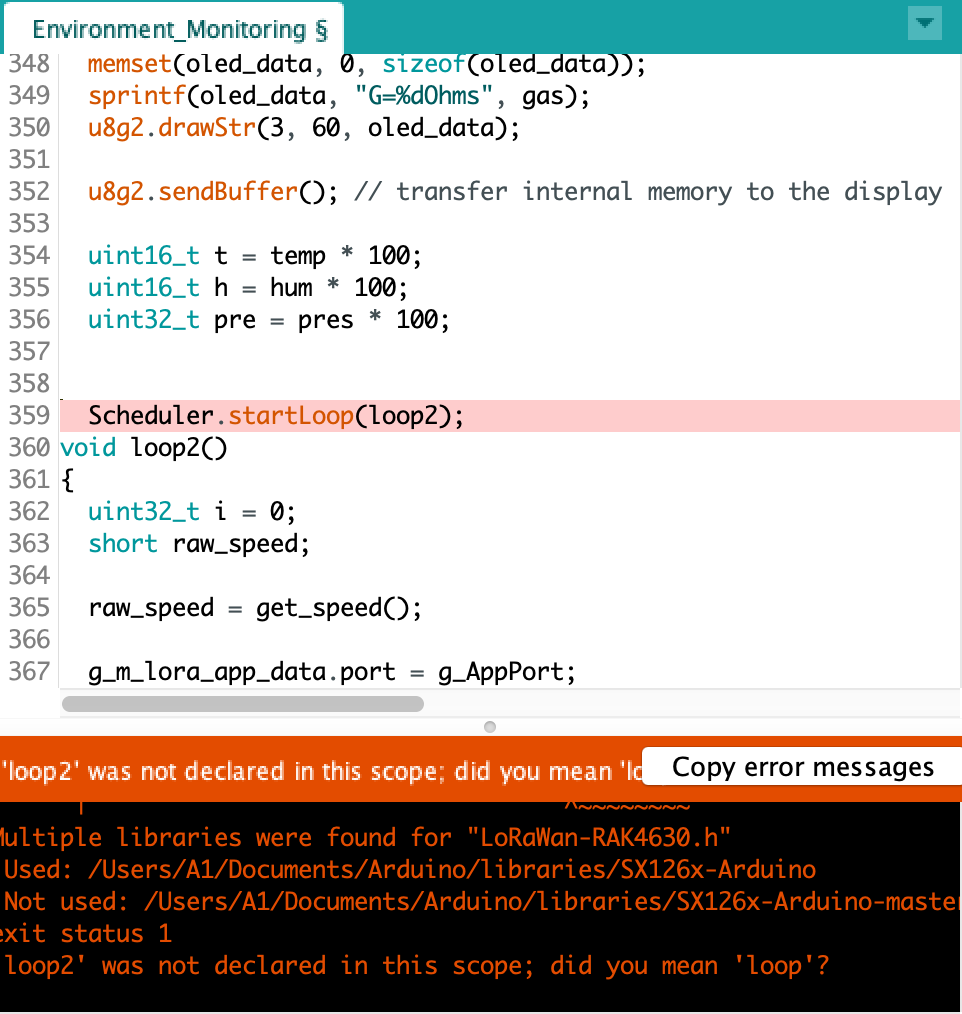
Here is the traceback
/var/folders/xb/nmm5r_sx6w91r2484l55308h0000gn/T/arduino_modified_sketch_277892/Environment_Monitoring.ino: In function 'void bme680_get()':
Environment_Monitoring:360:23: error: 'loop2' was not declared in this scope; did you mean 'loop'?
360 | Scheduler.startLoop(loop2);
| ^~~~~
| loop
Environment_Monitoring:362:1: error: a function-definition is not allowed here before '{' token
362 | {
| ^
Environment_Monitoring:392:34: error: 'raw_speed' was not declared in this scope
392 | m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
| ^~~~~~~~~
Multiple libraries were found for "LoRaWan-RAK4630.h"
Used: /Users/A1/Documents/Arduino/libraries/SX126x-Arduino
Not used: /Users/A1/Documents/Arduino/libraries/SX126x-Arduino-master
exit status 1
'loop2' was not declared in this scope; did you mean 'loop'?
It’s saying loop2 isn’t declared, is it in the wrong spot? I mostly have experience in just python, so this is definitely a learning curve for me. Thanks in advance!
I added this here and this here in that section like you said
And at the top I added the libraries here
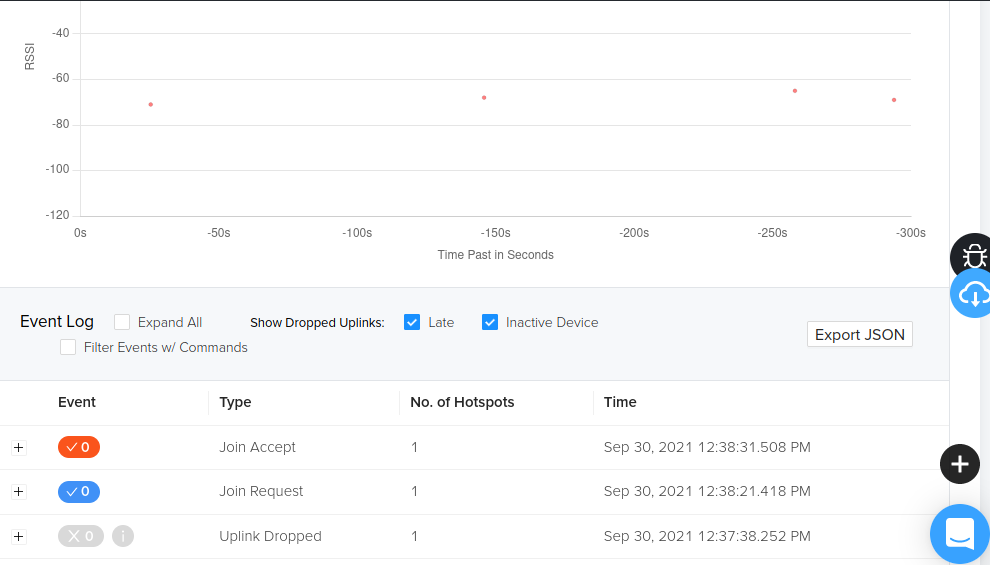
Also on a side note to debugging the connection drops on Helium (my Rak gateway shipped today by the way!) I noticed the uplinks are dropping. When i press the information button it says late packet. Does anyone know what that means? As you can see on the console picture, there are a bunch of requests but no actual packets going through, I keep unplugging it and re plugging it back in and still nothing happens
Hi @a1projects ,
Instead of checking all your errors. I just created a complete code that compiles with no error. I have no windspeed sensor here to verify but this should be a start for you once you got your sensor.
I will provide you 2 approaches. 1 that uses the scheduler and 1 that uses only millis. Both were compiled with no errors. You can review how the codes are implemented. Check it here Dropbox - Environment_windspeed - Simplify your life
Regarding Helium, sadly we cant really support you fully on that. It is best if you can ask it and follwe them on Helium discord especiallly the console channel. Many things are happening in Helium right now and we might not be really updated.
Thank you so much! I will give this a go when the sensor gets here. I am going to go through this and see what you did differently and learn from it. Now as far as splitting the payloads up, what do I need to do to make the payload split so that I can send all over the data over the network?
Regarding Helium, I will be able to run some tests and at least work on some stuff once my Rak gateway gets here in a few days that you guys recommended. Can I connect the gateway to datacake or something to display the packets data like I do with helium gateways?
The gateway is only a packet forwarder, whether it is a Helium Miner or a RAK7246 Gateway. It cannot visualize the data.
The Helium Miner is forwarding the LoRaWAN packets to the Helium Console which is the LoRaWAN server for the Helium network.
For the RAK7246 you have to setup to which LoRaWAN server it should forward the LoRaWAN packets. We have a Quick Start Guide how to do this for TTN, Chirpstack or ResIoT. The visualization of your data (Datacake, Cayenne MyDevices, …) is done by integrations in the LoRaWAN server, same as in the Helium Console.
Ok good deal beegee, I will set that up when the gateway gets here. Carl, how do I split a payload up so that it will transmit over the network since it is 2 projects combined? Is that done in the code or on the console/network end?
Also, is the scheduler for the wind speed specifically or for both sets of code? What exactly are you scheduling vs the millis script?
The wind speed sensor arrived today. So basically I remember you guys were saying to just cut the end off where the aux cord was and put those raw wires into the kit. I saw on this picture here they have those black and brown wires connected to those prongs. What are those prong pieces connected to, are they connected to a battery? Am I missing another part to make this work?

As I said @a1projects , I do not have the sensor here. But the datasheet says that those are power supply lines.
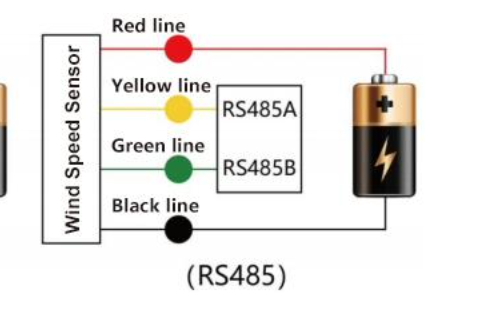
Have you checked the datasheet I posted above?
Btw, use a current limited power supply when testing these devices. That way you won’t fry anything accidentally. You should limit the current on a safe level.