Hi beegge,
I’ve been working with your example and I’ve tried to add the time in unixtime to payload but I haven’t had any luck.
I made changes to wisblock_cayenne.cpp and wisblock_cayenne.h but it didn’t work for me
uint8_t WisCayenne::addGNSS_6(uint8_t channel, int32_t latitude, int32_t longitude, int32_t altitude, uint32_t unixtime, uint16_t speed)
{
// check buffer overflow
if ((_cursor + LPP_GPS6_SIZE + 2 + 6) > _maxsize) // +6 para unixtime (4 bytes) y speed (2 bytes)
{
_error = LPP_ERROR_OVERFLOW;
return 0;
}
// Agregar latitud, longitud y altitud (ya explicado anteriormente)
_buffer[_cursor++] = channel;
_buffer[_cursor++] = LPP_GPS6;
latLong_s pos_union;
// Latitud
pos_union.val32 = latitude / 10; // Custom 0.000001 ° Signed MSB
_buffer[_cursor++] = pos_union.val8[3];
_buffer[_cursor++] = pos_union.val8[2];
_buffer[_cursor++] = pos_union.val8[1];
_buffer[_cursor++] = pos_union.val8[0];
// Longitud
pos_union.val32 = longitude / 10; // Custom 0.000001 ° Signed MSB
_buffer[_cursor++] = pos_union.val8[3];
_buffer[_cursor++] = pos_union.val8[2];
_buffer[_cursor++] = pos_union.val8[1];
_buffer[_cursor++] = pos_union.val8[0];
// Altitud
pos_union.val32 = altitude / 10; // Cayenne LPP 0.01 meter Signed MSB
_buffer[_cursor++] = pos_union.val8[2];
_buffer[_cursor++] = pos_union.val8[1];
_buffer[_cursor++] = pos_union.val8[0];
// Agregar unixtime (en formato entero de 32 bits, canal 102)
_buffer[_cursor++] = 102; // Canal para unixtime
_buffer[_cursor++] = LPP_UNIXTIME2; // Tipo de dato personalizado para unixtime
pos_union.val32 = unixtime;
_buffer[_cursor++] = pos_union.val8[3];
_buffer[_cursor++] = pos_union.val8[2];
_buffer[_cursor++] = pos_union.val8[1];
_buffer[_cursor++] = pos_union.val8[0];
// Agregar speed (en formato entero de 16 bits, canal 103)
_buffer[_cursor++] = 103; // Canal para speed
_buffer[_cursor++] = LPP_SPEED; // Tipo de dato personalizado para speed
pos_union.val32 = speed; // Multiplicar por 100 para mantener dos decimales (0.01 m/s)
_buffer[_cursor++] = pos_union.val8[1];
_buffer[_cursor++] = pos_union.val8[0];
return _cursor;
}
uint8_t addGNSS_6(uint8_t channel, int32_t latitude, int32_t longitude, int32_t altitude, uint32_t unixtime, uint16_t speed);
Afterwards I decided to leave it as it was at the beginning and modified only RAK12500_gss.cpp
/**
* @file RAK12500_gnss.cpp
* @author Bernd Giesecke ([email protected])
* @brief Initialization and usage of RAK12500
* @version 0.1
* @date 2024-01-14
*
* @copyright Copyright (c) 2024
*
*/
#include "../inc/app.h"
#include <SparkFun_u-blox_GNSS_Arduino_Library.h>
/** Instance for RAK12500 GNSS sensor */
SFE_UBLOX_GNSS my_gnss;
// GNSS functions
#define NO_GNSS_INIT 0
#define RAK1910_GNSS 1
#define RAK12500_GNSS 2
// Fake GPS Enable (1) Disable (0)
#define FAKE_GPS 0
/** GNSS polling function */
bool poll_gnss(void);
/** Flag if location was found */
volatile bool last_read_ok = false;
/** Flag if GNSS is serial or I2C */
bool i2c_gnss = false;
/** The GPS module to use */
uint8_t g_gnss_option = 2;
/** Start time of location acquisition */
time_t gnss_start;
/** End time of location acquisition */
time_t gnss_finished;
/**
* @brief Initialize GNSS module
*
* @return true if GNSS module was found
* @return false if no GNSS module was found
*/
bool init_gnss(void)
{
// Power on the GNSS module
digitalWrite(WB_IO2, HIGH);
// Give the module some time to power up
delay(500);
if (!my_gnss.begin(Wire))
{
MYLOG("GNSS", "Could not initialize RAK12500 on Wire");
return false;
}
my_gnss.setI2COutput(COM_TYPE_UBX); // Set the I2C port to output UBX only (turn off NMEA noise)
my_gnss.saveConfiguration(); // Save the current settings to flash and BBR
my_gnss.setMeasurementRate(500);
return true;
}
/**
* @brief GNSS location acquisition
* Called every 2.5 seconds by timer 1
* Gives up after 1/2 of send interval
* or when location was aquired
*
*/
void gnss_handler(void *)
{
digitalWrite(LED_GREEN, HIGH);
if (poll_gnss())
{
// Power down the module
digitalWrite(WB_IO2, LOW);
delay(100);
MYLOG("GNSS", "Got location");
api.system.timer.stop(RAK_TIMER_1);
gnss_finished = millis();
digitalWrite(LED_BLUE, HIGH);
send_packet();
}
else
{
if (check_gnss_counter >= check_gnss_max_try)
{
// Power down the module
digitalWrite(WB_IO2, LOW);
delay(100);
MYLOG("GNSS", "Location timeout");
api.system.timer.stop(RAK_TIMER_1);
gnss_finished = millis();
digitalWrite(LED_BLUE, HIGH);
send_packet();
}
}
check_gnss_counter++;
digitalWrite(LED_GREEN, LOW);
}
/**
* @brief Check GNSS module for position
*
* @return true Valid position found
* @return false No valid position
*/
bool poll_gnss(void)
{
last_read_ok = false;
time_t time_out = millis();
int64_t latitude = 0;
int64_t longitude = 0;
int32_t altitude = 0;
int16_t accuracy = 0;
uint8_t satellites = 0;
float speed = 0;
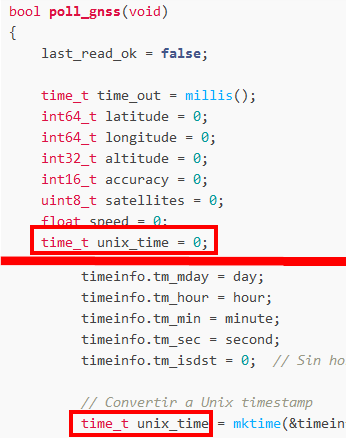
time_t unix_time = 0;
// Obtener fecha y hora
uint16_t year = 0;
uint8_t month = 0;
uint8_t day = 0;
uint8_t hour = 0;
uint8_t minute = 0;
uint8_t second = 0;
bool has_pos = false;
bool has_alt = false;
if (my_gnss.getGnssFixOk())
{
byte fix_type = my_gnss.getFixType(); // Get the fix type
char fix_type_str[32] = {0};
#if MY_DEBUG > 0
if (fix_type == 0)
sprintf(fix_type_str, "No Fix");
else if (fix_type == 1)
sprintf(fix_type_str, "Dead reckoning");
else if (fix_type == 2)
sprintf(fix_type_str, "Fix type 2D");
else if (fix_type == 3)
sprintf(fix_type_str, "Fix type 3D");
else if (fix_type == 4)
sprintf(fix_type_str, "GNSS fix");
else if (fix_type == 5)
sprintf(fix_type_str, "Time fix");
#endif
if ((fix_type >= 3) && (my_gnss.getSIV() >= 5)) /** Fix type 3D and at least 5 satellites */
// if (fix_type >= 3) /** Fix type 3D */
{
last_read_ok = true;
latitude = my_gnss.getLatitude();
longitude = my_gnss.getLongitude();
altitude = my_gnss.getAltitude();
accuracy = my_gnss.getHorizontalDOP();
satellites = my_gnss.getSIV();
speed = my_gnss.getGroundSpeed();
// Obtener fecha y hora
year = my_gnss.getYear();
month = my_gnss.getMonth();
day = my_gnss.getDay();
hour = my_gnss.getHour();
minute = my_gnss.getMinute();
second = my_gnss.getSecond();
// Crear estructura tm para la fecha y hora
struct tm timeinfo;
timeinfo.tm_year = year - 1900; // El año en la estructura tm se cuenta desde 1900
timeinfo.tm_mon = month - 1; // Los meses en tm van de 0 a 11
timeinfo.tm_mday = day;
timeinfo.tm_hour = hour;
timeinfo.tm_min = minute;
timeinfo.tm_sec = second;
timeinfo.tm_isdst = 0; // Sin horario de verano
// Convertir a Unix timestamp
time_t unix_time = mktime(&timeinfo);
// Verificar si hubo un error en la conversión
if (unix_time == -1) {
MYLOG("GNSS", "Error en la conversión a Unix Timestamp");
return false;
}
MYLOG("GNSS", "Fixtype: %d %s", my_gnss.getFixType(), fix_type_str);
MYLOG("GNSS", "Lat: %.4f Lon: %.4f", latitude / 10000000.0, longitude / 10000000.0);
MYLOG("GNSS", "Alt: %.2f", altitude / 1000.0);
MYLOG("GNSS", "Acy: %.2f ", accuracy / 100.0);
MYLOG("GNSS", "Sat: %d", satellites);
MYLOG("GNSS", "Spe: %.2f km/h", speed * 0.0036); // Convertir a km/h
// Log de fecha y hora UTC
MYLOG("GNSS", "Fecha: %04d-%02d-%02d", year, month, day);
MYLOG("GNSS", "Hora UTC: %02d:%02d:%02d", hour, minute, second);
MYLOG("GNSS", "Unix Timestamp: %ld",(long) unix_time); // Mostrar el Unix timestamp
}
}
char disp_str[255];
if (last_read_ok)
{
if ((latitude == 0) && (longitude == 0))
{
last_read_ok = false;
return false;
}
// Add the location to the payload
g_solution_data.addGNSS_6(LPP_CHANNEL_GPS, latitude, longitude, altitude);
g_solution_data.addGenericSensor(LPP_CHANNEL_SPEED, speed);
g_solution_data.addUnixTime(LPP_CHANNEL_UNIXTIME, unix_time);
return true;
}
else
{
// No location found
#if FAKE_GPS > 0
MYLOG("GNSS", "Faking GPS");
// 14.4213730, 121.0069140, 35.000
latitude = 144213730;
longitude = 1210069140;
altitude = 35000;
accuracy = 1;
satellites = 18;
g_solution_data.addGNSS_6(LPP_CHANNEL_GPS, latitude, longitude, altitude);
last_read_ok = true;
return true;
#endif
}
// MYLOG("GNSS", "No valid location found");
last_read_ok = false;
return false;
}
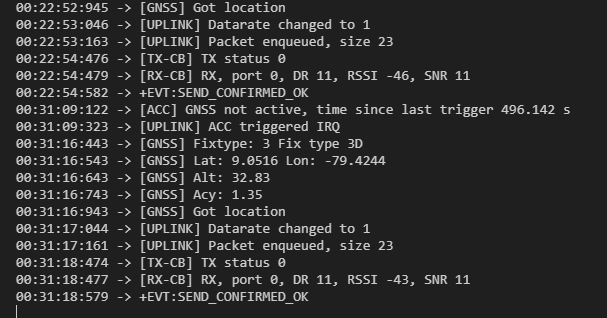
The result is always 0000000 for unixtime but for speed it is working without any problem.
017401870a89008a1e9cfb44149f001b631464000000071e85000000000a8500000015
11:21:02:959 -> [GNSS] Lat: 9.0518 Lon: -79.4244
11:21:03:059 -> [GNSS] Alt: 37.43
11:21:03:159 -> [GNSS] Acy: 2.03
11:21:03:259 -> [GNSS] Sat: 9
11:21:03:359 -> [GNSS] Spe: 0.12 km/h
11:21:03:459 -> [GNSS] Fecha: 2024-09-22
11:21:03:559 -> [GNSS] Hora UTC: 16:21:03
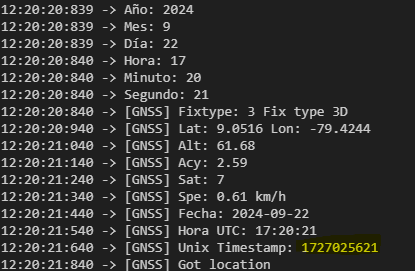
11:21:03:659 -> [GNSS] Unix Timestamp: 1727022063
Bat Lat Lon Alt Speed mm/s unix timestamp Unix time start - finish
0174 0186 0a89 008a1ea8 fb44144e 000e9f 146400000020 1e85 00000000 0a85 00000019
Can you tell me what would be the best way to get this data or if you can verify that I’m doing it wrong?
Best Regards.,