It worked for a few uploads, then it would only upload if it was in DFU mode, and now I cant even upload the blinking LED light example script. I read the errors but I don’t understand what it means. For example: Undefined reference to a package. - Well the package is installed and you didn’t have a problem with it before…
Undefined reference to serial. - That’s not helpful…
Can’t communicate to COM port. - Why not? Nothing else is using it?
I don’t want to spam this post with errors. What can I do to solve this mess?
RAK 4631, Windows 10, Using Arduno Wisblock 4631 board.
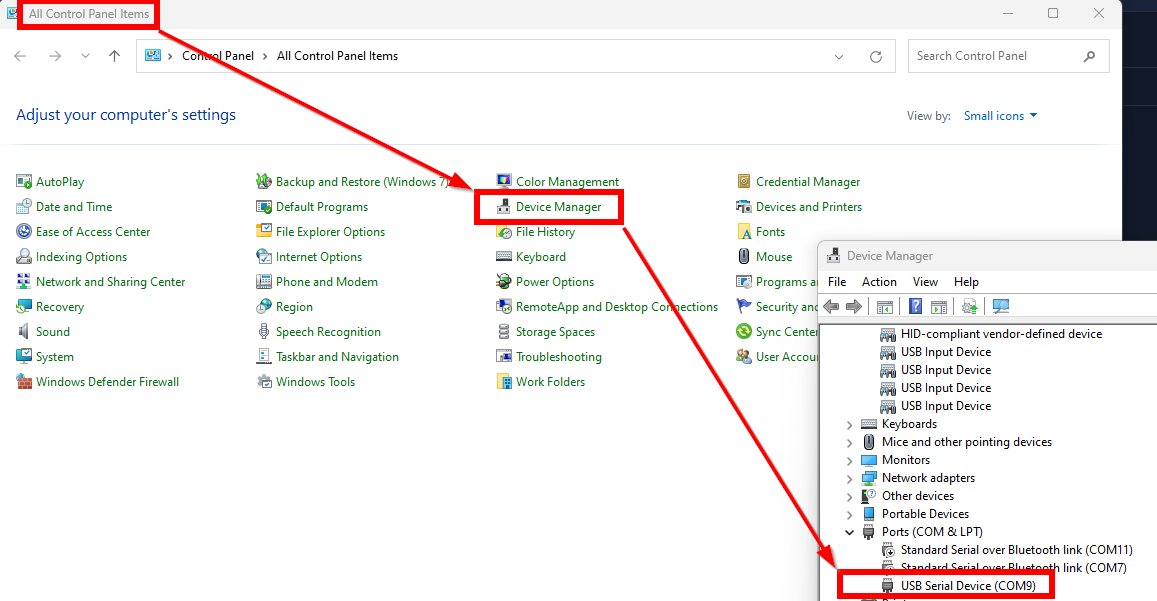
If you plug in the RAK4631 to the USB port, does it give you a sound and does it assign a COM port to it?
You can check in the Device Manager if a new COM port is showing up.
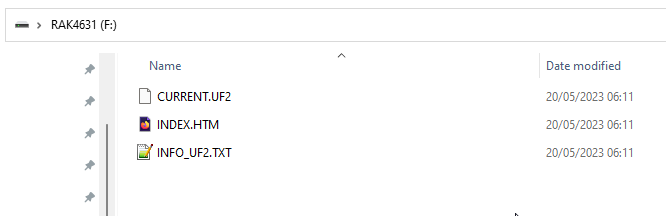
It is assigned a COM port. In fact I’ve changed it as a test to it saying the port was busy. I currently have it on 8. If it DFU mode is COM5. When it DFU mode, file explorer does pop up with those 3 files as shown in your screenshot.
I have tried different USB cables and USB ports. From the motherboard to a USB hub that plugs into a pcie. I’ve even given the hail-Mary full PC restart.
At this point, with all the weird errors you are getting, I can only guess that something is messed up with the Arduino installation.
Try to uninstall everything install from scratch.
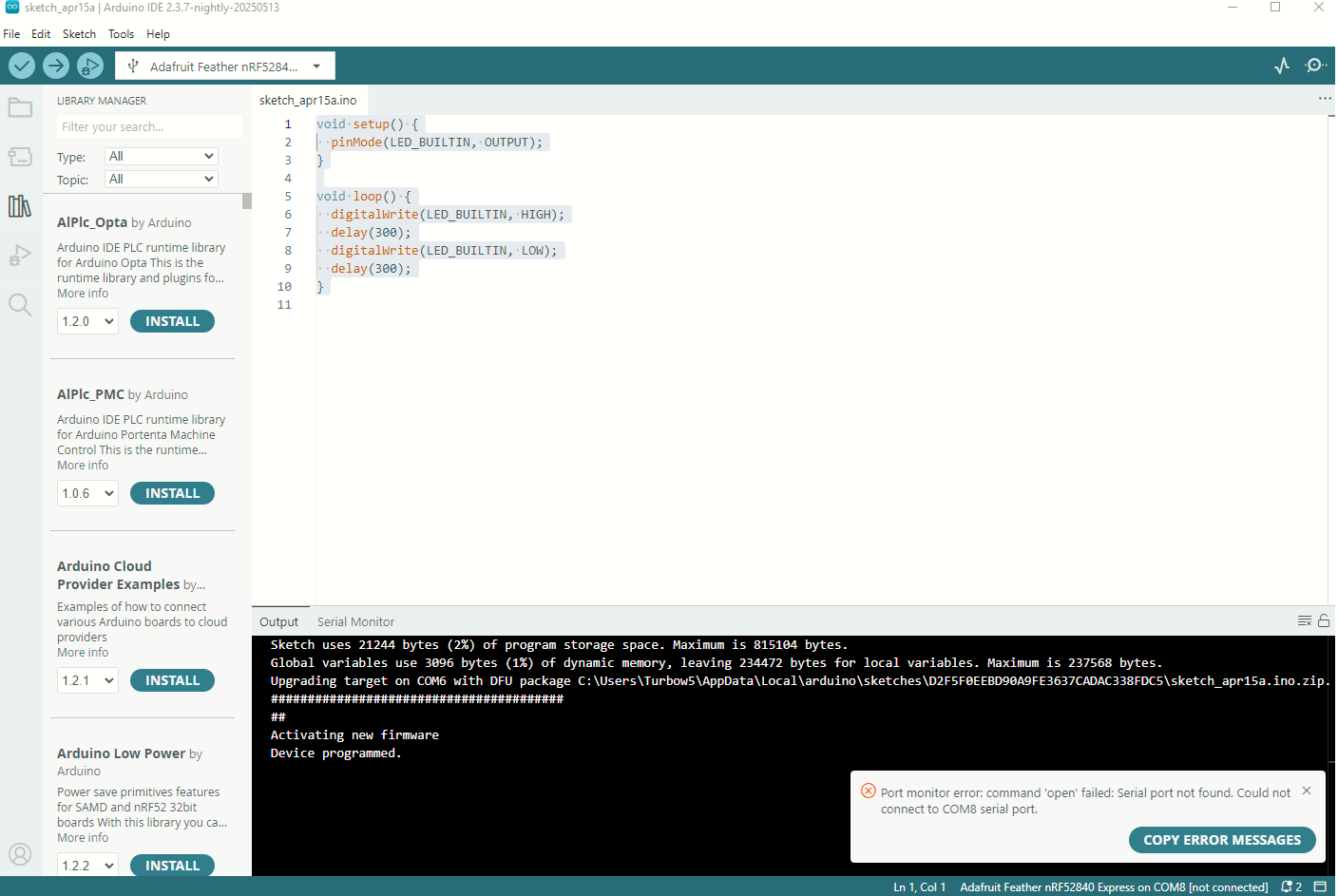
So I uninstalled it, deleted the libraries, then installed the portable version, and I’m back to this (screenshot). Where it says upload successful, but at the same time says cant access the COM port. And the board isn’t blinking at all.
Edit: I just noticed the screenshot says it uploaded to com6 and not 8, so I plugged the 4631 back in, and now it’s not even showing up under device manager (but does have a solid red light) . But now it’s making a sound of… a high pitch then low pitch, repeating. So I double tap the button, goes into DFU mode, I see it on COM5, try to upload a different script, thinking maybe what I posted was wrong. Still got that error of failed to open COM.
so I’ve used the Adafruit and Wisblock for testing, and it doesn’t get rid of any error. I’ve changed the code, used the simple examples that come with Arduino, but it’s stuck. Is there a way to tell if the board is faulty/locked up?
Double push reset button to get into UF2 bootloader mode.
Copy the UF2 file from the attached ZIP file into the new external drive RAK4631
Check USB log output after reset of the device.
I can’t even get it on there. It tries to copy over but the RAK goes out of bootlaoder mode and then the boards flashing green and blue lights. Almost like a siren.
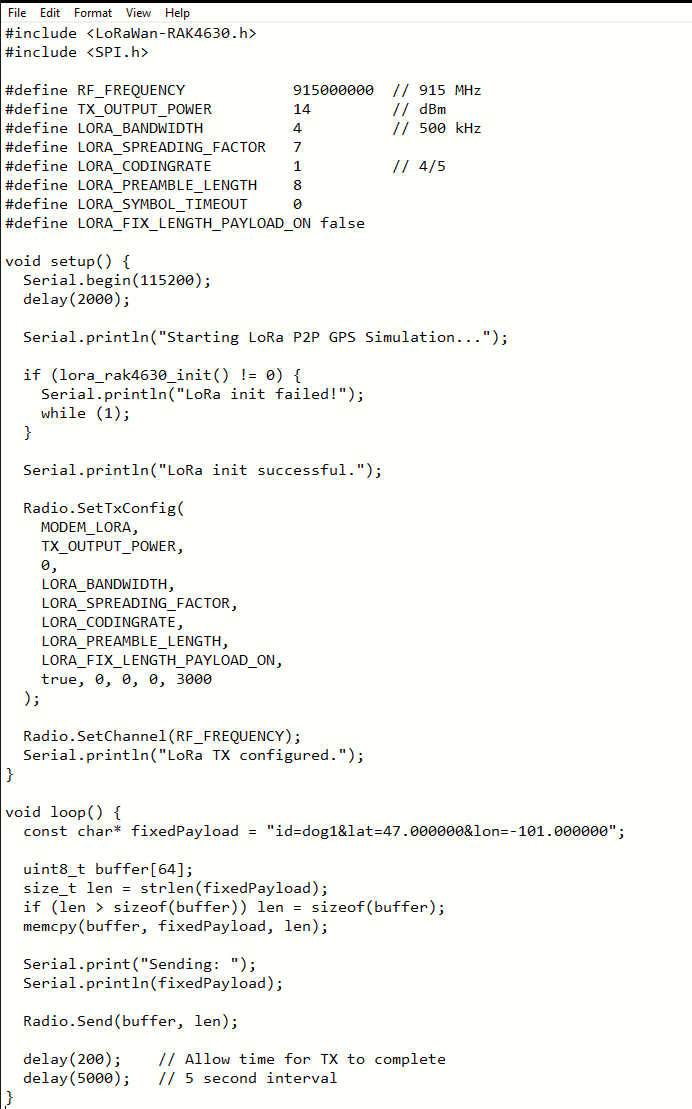
Ok I can see it getting a GPS fix and TX over LoRa. Cool. So I tried to upload my own script and it said upload successful, but then got that message of “was unable to get success message from com”. Maybe it’s the code I’m uploading?
I’d love to but txt is not an option, and new users can’t upload docx, and there’s no option for ZIP…So…I’ll paste it here. (this pasted really clean. if I knew this I would have pasted here sooner)
So great news, After flashing it, and trying your code, I’ve been able to upload to the 4631 flawlessly. And I’ve been trying my own scripts with it and it continues to work flawlessly. As far as what was causing the COM/serial output issues, I don’t know. But I’m glad it works now!