I am currently working on a LoRaWAN GPS tracker, that sends the GPS Coordinates and the environmental values every 10 sec, when a motion detected.
I am using the RAK5005-O Base, RAK4631 Core, RAK191 GPS Sensor, RAK1904 3-axis Motion Sensor and RAK1906 Environment Sensor.
I have a Problem with the GPS-Sensor, that the GPS coordinates are not accurate at all, According to Google Maps search with the coordinates (50.1576692,010.5783839) I’m about 30KM away from my current location! Although the antenna has a clear view of the sky.
I have used more than one firmware, including the Examples in the Arduino IDE (RAK1910_GPS_UBLOX7.ino and GPS_Tracker.ino), but no deference at all.
After you update your BSP, can you try this LoRaWAN tracker example? This is the latest one with working decoders for TTN and Chirpstack. Make sure as well that your sx126x library is updated too.
thank you very much for your advice, I really appreciate it.
I have updated my IDE and the boards packages to RAKwireless Esp32 Boards 1.0.4 and Rakwireless nRF Boards 0.21.20
But I’m still facing the same Problem, what should I do next?
Do you have another device with GPS capabilities? Or can you try to use your phone (with WiFi and cellular turned off) and try to get a location for comparison?
Hello,
Thank you all for your quick responses.
I don’t have any issues with any device at my place.
I tested further with an Arduino UNO and a GPS shield, with the MTK-MT3339 module on it, and as predicted the coordinates I’m getting are pretty precise, just a couple of meters away from my location.
Sorry, I have no other suggestions. I have the RAK1910 working with our example software and it gives me a location right in my backyard, precision ~2m.
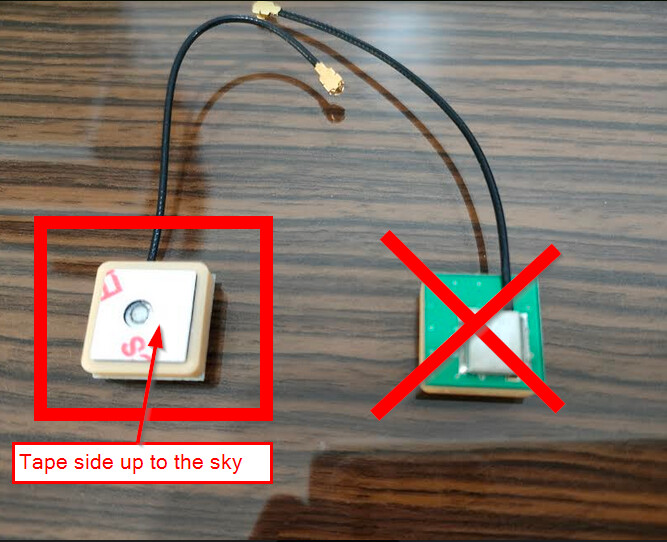
What GPS antenna are you using? How long does it take to get a location fix?
The small square-shaped one, which was included in the WisBlock Connected Box.
It takes indeed comparatively quite too long to receive the first data-Bytes, up to 2 mins.
Do you assume, that we might have a defective device?
How long was the device on for previously and how recently.
It takes a GPS a minimum of 12 minutes to gather the latest almanac & ephemeris and the hot fix data will expire in less then 24 hours, so you’d only get a warm fix (somewhere about your 2 minute time).
When I say minimum of 12 minutes, basically you either get the module to report it’s status or you have to leave it on for about 20 minutes once every couple of days so it can do a hot fix.
As for sending updates over LoRaWAN every 10 seconds, this would be illegal in many jurisdictions, mostly definitely in Germany!
I let the RAK1910_GPS_UBLOX7 firmware run for almost 2 days and had the serial output monitored and logged in a file, although the antenna shadows(the device located inside the building). I’m getting very satisfactory and pretty precise data. As good as other devices.