16:03:11.088 → X = 80.07mg Y = 960.78mg Z =32.03mg
16:03:11.088 → $GPRMC,220301.00,A,3506.61321,N,09226.97117,W,0.562,100122,A$GPRMC,220311.00,A,3506.61551,N,09226.96981,W,0.144,100122,A66
16:03:11.187 → $GPVTG,T,M,0.144,N,0.266,K,A20
16:03:11.388 → $GPGGA,220311.00,3506.61551,N,09226.96981,W,1,05,3.07,122.0,M,-28.6,M,6A
16:03:11.388 → $GPGSA,A,3,14,08,30,27,07,3.75,3.07,2.150D
16:03:11.388 → $GPGSV,3,1,12,01,13,146,04,15,172,20,07,73,344,28,08,55,053,237B
16:03:11.453 → $GPGSV,3,2,12,09,39,201,17,13,01,327,14,27,270,26,16,03,067,177A
16:03:11.520 → $GPGSV,3,3,12,17,08,209,21,26,117,20,27,23,042,18,30,46,316,2879
16:03:11.586 → $GPGLL,3506.61551,N,09226.96981,W,220311.00,A,A7E
16:03:12.084 → lmh_send ok count 1
16:03:22.093 → check acc!
16:03:22.093 → X = 80.07mg Y = 960.78mg Z =48.04mg
16:03:22.093 → $GPRMC,220312.00,A,3506.61548,N,09226.96964,W,0.067,100122,A0,A,3506.61440,N,09226.97003,W,0.386,100122,A69
16:03:22.192 → $GPVTG,T,M,0.386,N,0.715,K,A2D
16:03:22.192 → $GPGGA,220322.00,3506.61440,N,09226.97003,W,1,05,3.08,120.7,M,-28.6,M,63
16:03:22.325 → $GPGSA,A,3,14,08,30,27,07,3.75,3.08,2.1502
16:03:22.325 → $GPGSV,3,1,12,01,13,146,04,15,172,22,07,73,344,28,08,55,053,2278
16:03:22.391 → $GPGSV,3,2,12,09,39,201,11,13,01,327,14,27,270,25,16,03,067,177F
16:03:22.523 → $GPGSV,3,3,12,17,08,209,21,21,27,117,22,27,22,042,17,30,46,316,2778
16:03:23.087 → $GPGLL,3506.61440,N,09226.97003,W,220322.00,A,A7D
16:03:23.087 → $GPRMC,220323.lmh_send ok count 2
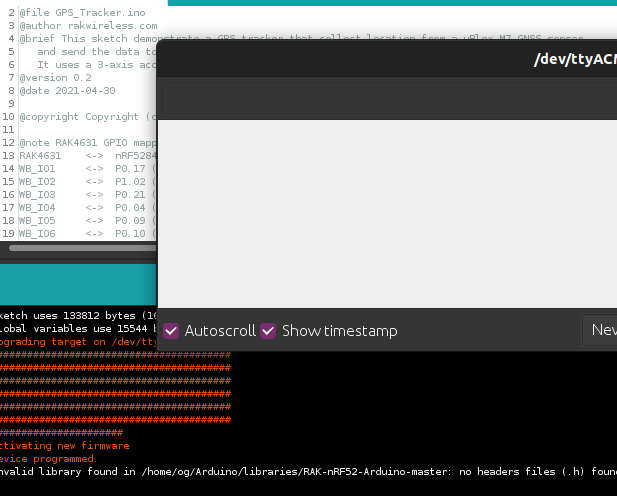
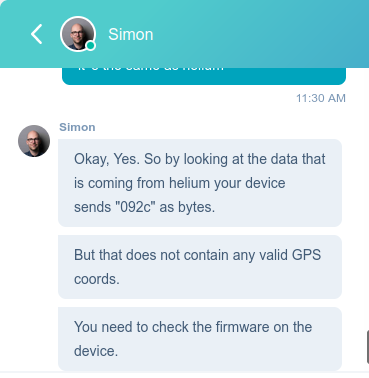
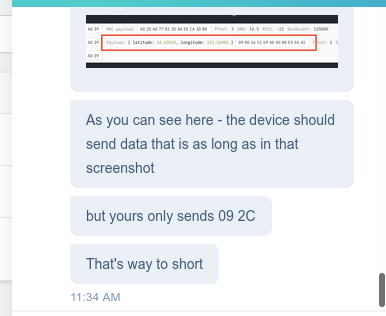
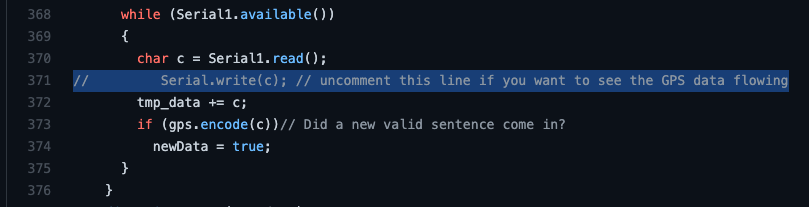
Started doing this, but it was sending data before and he said it wasn’t right I didn’t have this nmea log though