Hello, does anyone have experience or thoughts about improving the accuracy of the RAK1910 UBLOX GPS receiver via the application of RTK (realtime kinematic) correction data?
Specifically in my use-case, internet-based RTK data could be obtained via NTRIP streamer using the RAK5860 cellular IOT modem and applied via the Wisblock microcontroller, before logging individual GPS location coordinates.
With up-to-date RTK data and a clear-sky signal, could the unit’s accuracy be improved to a few cm? or is the internal precision of the unit too low (i.e. not enough decimal places) such that additional correction data would be useless?
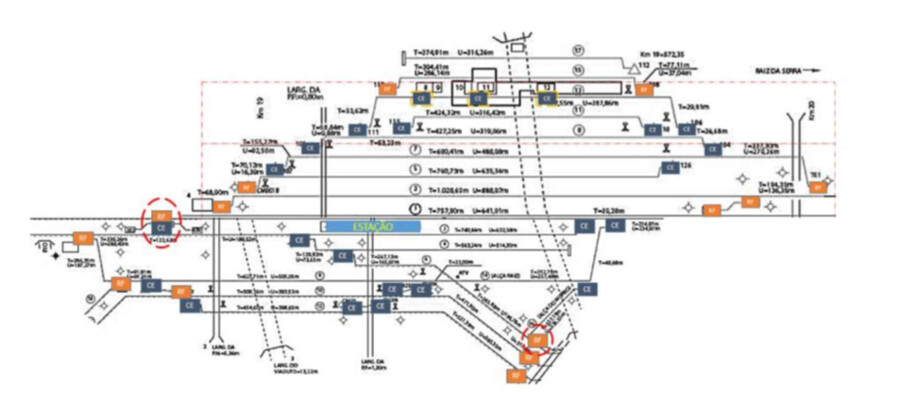
@beegee , I am looking the same kind of solution for my Railroad company client. We need to know in each side-by-side train line with precision around 5 m. Take a look in the example below: