
Hello,
I am using the WIs Trio RAK5205 Node. It’s successfully working and I got all the data of sensor and Gps on TTN as well as on Cayenne. But face one difficulty that I got the GPS data latitude and longitude but don’t get the accurate location on Cayenne Map and it’s showing 100 meters far away from my location. As I have some knowledge about GPS latitude and longitude data that when it’s the value after the point is six or more digit than we get the accurate location. But in the GPS data of RAK5205, I got the only four digit value after the point value(Ex. 23.0217). Please suggest me about that and also refer the attached SS for the reference.
Hi @Alluvium_2019
The 4 digits only after point is limitation of Cayenne LPP format. They promise 4 bytes per each in LPP2 but this is not yet made. If you want more accurate data it can be done by changing the 5205 FW and write a custom decoder for Cayenne.
Regards
Hello @velev,
Thank for the quick response. Can you help me with the payload custom decoder for Cayenne?
I will try , but there are changes that has to be made in the 5205 FW. So this will take some time.
PS The fourth decimal place is worth up to 11 m. so not so bad 
Hi Velev. Is it possible to have 6 digits accuracy changing the Chirpstack decoder?
You can have 6-digits accuracy but you need to change the FW of RAK5205.
The source code is here Products_practice_based_on_RUI_v2.0/app_5205.c at master · RAKWireless/Products_practice_based_on_RUI_v2.0 · GitHub
You’ll need to add a[sensor_data_cnt++]=((int32_t)(bsp_sensor.latitude * 10000) >> 32) & 0xFF;
You must do this to the longitude as well.
The you need to adjust your decoder on the server (Chirpstack) side as well.
1 Like
Hi @ahugo ,
I want to add some clarifications on my first reply. There was actually a 6-digit accuracy on RAK5205. The command is at+set_config=device:gps_format:1 for 6-digit accuracy then at+set_config=device:gps_format:0 for 4-digit.
I will update the documentation and it should reflect on the next few days.
Chirpstack decoder for 6-digit:
Chirpstack decoder for 4-digit:
1 Like
Thank you. It works ok!
1 Like
Hi @carlowan
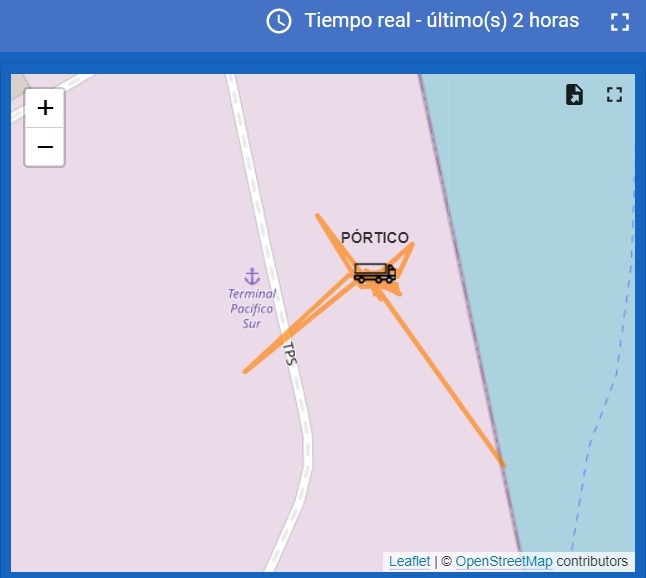
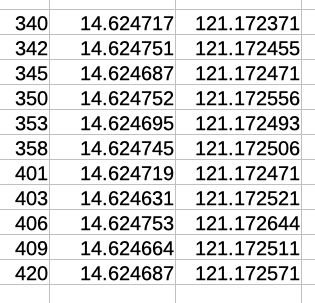
After setting the GPS precision to 6 digit I’m still having some inaccuracy in the GPS answer. In this picture we are positioning a port crane (not a truck) who was static for the period of time (2 hours) and the position jumps several times between 10 to more than 100 meters.
The RAK5005 is installed in the roof of this crane with total sky view and with enough battery and solar panel to recharge it.
The objective is to position the crane in its lane (which is straight) in the dock of the port and with this inaccuracy I am not being able to meet the objective.
How can I get better precision, closer to the 2.5 meters that the Ublox Max 7Q GPS that is installed in the RAK5205 should give?
How long is the sending interval you set?
Also, how long is the GPS scanning time?
It is sending each 6 minutes.
I do not change nothing regarding the GPS scanning time. It is by default. I do not know how to change it.

Hi @ahugo ,
I am setting up to replicate this issue. I’ll get back to you and help you identify the cause.
Hi Alejandro,
The biggest change that you have is caused by the longitude. It reached the 3rd decimal which will account to 100meter discrepancy.
I did my test and just my placed my RAK5205 outside our house. My result is fine. I am having issues on the integration of TTN V3 so I just logged manually.
My changes are at 4-decimal place which is around 10 meters accuracy worst. 2.0m is the best we can have on the onboard GPS of RAK5205. If this is not acceptable on your application, probably you need a system with ground reference like RTK, DGPS, etc.
Since clear sky is ok, battery/power is ok, can you confirm if your GPS antenna is ok? Is it connected correctly and away from any metallic obstructions?
Might be illogical but you can also try to reupload the FW of your RAK5205 then put it outside to test? I have this experience before that my RAK5205 will only fix once then wont transmit GPS coordinaets again. But I can’t really verify if it is the FW because when I reuploaded the FW, I also reconnect the IPEX antenna. So it could be the antenna or the fresh FW.
Thank you Carl.
This is the RAK5205 in the top of the crane. The GPS antena is in the top in the side of the solar panel. It is no covered by it.

The 2,5 mts. accuracy is enough for this application, But I do not get this
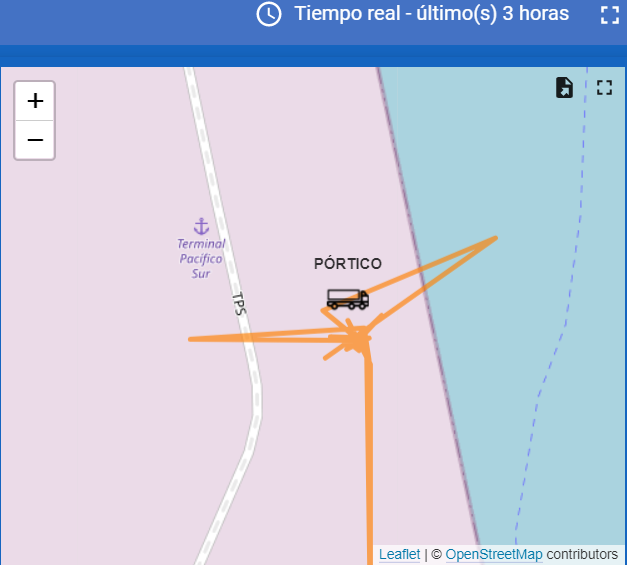
In this other application a RAK 5205 is on the deck of a yacht that is moored at the dock of a yacht club. As you will see, sometimes it appears on the street.

Could be something wrong in the decoder? Or maybe the internal antenna is not enough for the GPS? or anything else who can be done to improve the accuracy at least to get closer to design precision?
Thanks for the clear images.
Are the data from other sensors ok? Like temperature, etc? If it is the decoder, those must be out of range too.
It seems that the device is already exposed for a long time so the fix should be done already.
Few things that we need to check are the integrity of the GPS antenna if it is properly connected and there is no osbtruction. And you checked it already.
Hmm. It seems you have a thingsboard dashboard, do you have data for the battery voltage level?
I wish you reupload the fw if you can. It is the crane that is really strange. On the yatch, it is like few meters away from the street so the drift is less than 10meters?