/**
* @file Wind_Speed_Monitoring.ino
* @author rakwireless.com
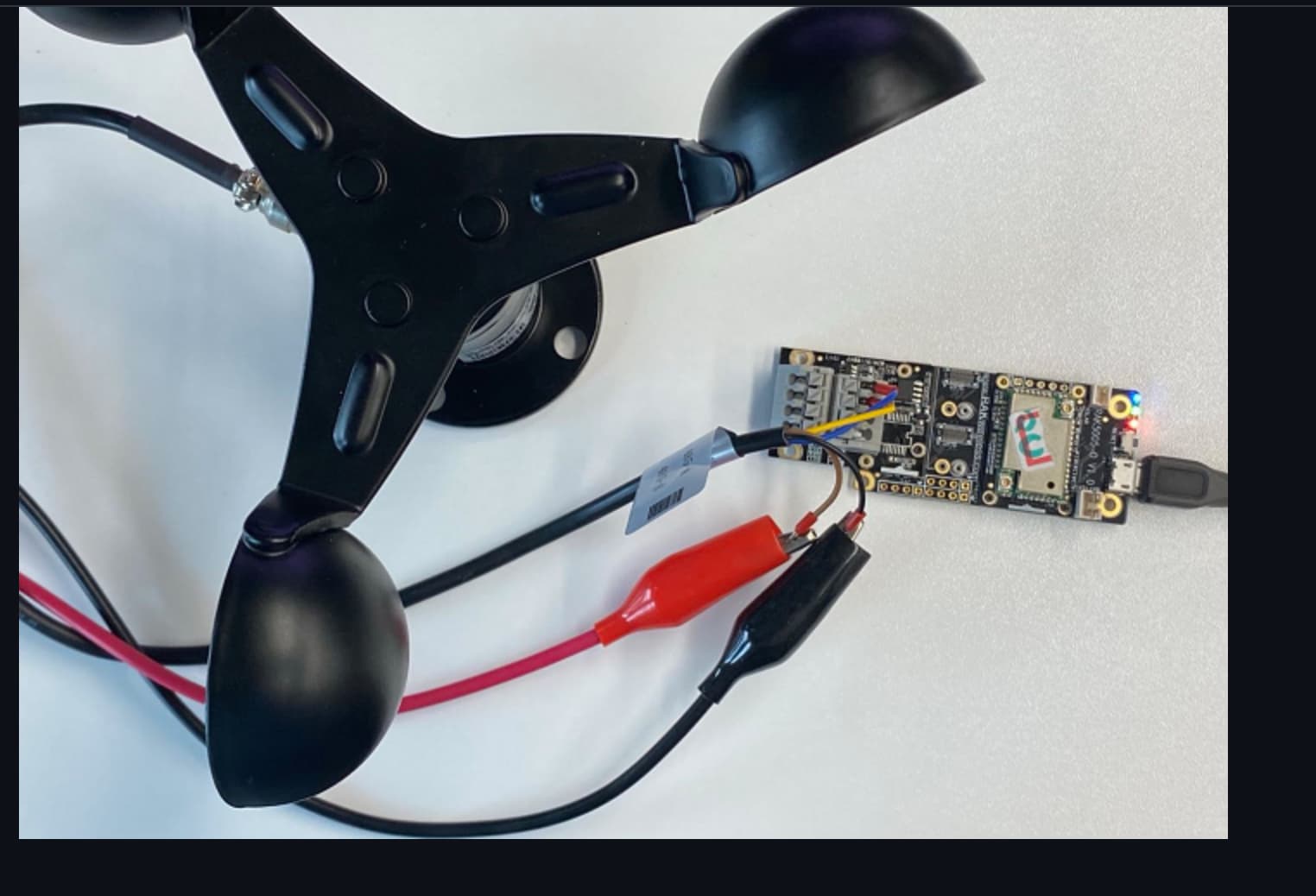
* @brief This sketch demonstrate reading a data from a wind speed sensor
* and send the data to lora gateway.
* @version 0.1
* @date 2020-07-28
* @copyright Copyright (c) 2020
*/
#include <Arduino.h>
#include <ArduinoModbus.h> //Click here to get the library: http://librarymanager/All#ArduinoModbus
#include <LoRaWan-RAK4630.h> // Click here to get the library: http://librarymanager/All#SX126x
#include <SPI.h>
// Check if the board has an LED port defined
#ifndef LED_BUILTIN
#define LED_BUILTIN 35
#endif
#ifndef LED_BUILTIN2
#define LED_BUILTIN2 36
#endif
bool doOTAA = true; // OTAA is used by default.
#define SCHED_MAX_EVENT_DATA_SIZE APP_TIMER_SCHED_EVENT_DATA_SIZE /**< Maximum size of scheduler events. */
#define SCHED_QUEUE_SIZE 60 /**< Maximum number of events in the scheduler queue. */
#define LORAWAN_DATERATE DR_0
#define LORAWAN_TX_POWER TX_POWER_0
#define JOINREQ_NBTRIALS 3 /**< Number of trials for the join request. */
DeviceClass_t g_CurrentClass = CLASS_A;
LoRaMacRegion_t g_CurrentRegion = LORAMAC_REGION_EU868; /* Region:EU868*/
lmh_confirm g_CurrentConfirm = LMH_CONFIRMED_MSG;
uint8_t g_AppPort = LORAWAN_APP_PORT;
/**@brief Structure containing LoRaWan parameters, needed for lmh_init()
*/
static lmh_param_t g_lora_param_init = {
LORAWAN_ADR_ON,
LORAWAN_DATERATE,
LORAWAN_PUBLIC_NETWORK,
JOINREQ_NBTRIALS,
LORAWAN_TX_POWER,
LORAWAN_DUTYCYCLE_OFF
};
// Foward declaration
static void lorawan_has_joined_handler(void);
static void lorawan_join_failed_handler(void);
static void lorawan_rx_handler(lmh_app_data_t *app_data);
static void lorawan_confirm_class_handler(DeviceClass_t Class);
static void send_lora_frame(void);
/**@brief Structure containing LoRaWan callback functions, needed for lmh_init()
*/
static lmh_callback_t g_lora_callbacks = {
BoardGetBatteryLevel,
BoardGetUniqueId,
BoardGetRandomSeed,
lorawan_rx_handler,
lorawan_has_joined_handler,
lorawan_confirm_class_handler,
lorawan_join_failed_handler
};
//OTAA keys !!!! KEYS ARE MSB !!!!
uint8_t nodeDeviceEUI[8] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x33, 0x33};
uint8_t nodeAppEUI[8] = {0xB8, 0x27, 0xEB, 0xFF, 0xFE, 0x39, 0x00, 0x00};
uint8_t nodeAppKey[16] = {0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88};
// ABP keys
uint32_t nodeDevAddr = 0x260116F8;
uint8_t nodeNwsKey[16] = {0x7E, 0xAC, 0xE2, 0x55, 0xB8, 0xA5, 0xE2, 0x69, 0x91, 0x51, 0x96, 0x06, 0x47, 0x56, 0x9D, 0x23};
uint8_t nodeAppsKey[16] = {0xFB, 0xAC, 0xB6, 0x47, 0xF3, 0x58, 0x45, 0xC7, 0x50, 0x7D, 0xBF, 0x16, 0x8B, 0xA8, 0xC1, 0x7C};
// Private defination
#define LORAWAN_APP_DATA_BUFF_SIZE 64 /**< buffer size of the data to be transmitted. */
#define LORAWAN_APP_INTERVAL 20000 /**< Defines for user timer, the application data transmission interval. 20s, value in [ms]. */
static uint8_t g_m_lora_app_data_buffer[LORAWAN_APP_DATA_BUFF_SIZE]; //< Lora user application data buffer.
static lmh_app_data_t g_m_lora_app_data = {g_m_lora_app_data_buffer, 0, 0, 0, 0}; //< Lora user application data structure.
TimerEvent_t g_appTimer;
static uint32_t timers_init(void);
static uint32_t g_count = 0;
static uint32_t g_count_fail = 0;
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
// Initialize LoRa chip.
lora_rak4630_init();
// Initialize Serial for debug output
time_t timeout = millis();
Serial.begin(115200);
while (!Serial)
{
if ((millis() - timeout) < 5000)
{
delay(100);
}
else
{
break;
}
}
Serial.println("=====================================");
Serial.println("Welcome to RAK4630 LoRaWan!!!");
if (doOTAA)
{
Serial.println("Type: OTAA");
}
else
{
Serial.println("Type: ABP");
}
switch (g_CurrentRegion)
{
case LORAMAC_REGION_AS923:
Serial.println("Region: AS923");
break;
case LORAMAC_REGION_AU915:
Serial.println("Region: AU915");
break;
case LORAMAC_REGION_CN470:
Serial.println("Region: CN470");
break;
case LORAMAC_REGION_EU433:
Serial.println("Region: EU433");
break;
case LORAMAC_REGION_IN865:
Serial.println("Region: IN865");
break;
case LORAMAC_REGION_EU868:
Serial.println("Region: EU868");
break;
case LORAMAC_REGION_KR920:
Serial.println("Region: KR920");
break;
case LORAMAC_REGION_US915:
Serial.println("Region: US915");
break;
}
Serial.println("=====================================");
if (!ModbusRTUClient.begin(9600))
{
Serial.println("Failed to start Modbus RTU Client!");
while (1)
;
}
Scheduler.startLoop(loop2);
//creat a user timer to send data to server period
uint32_t err_code;
err_code = timers_init();
if (err_code != 0)
{
Serial.printf("timers_init failed - %d\n", err_code);
return;
}
// Setup the EUIs and Keys
if (doOTAA)
{
lmh_setDevEui(nodeDeviceEUI);
lmh_setAppEui(nodeAppEUI);
lmh_setAppKey(nodeAppKey);
}
else
{
lmh_setNwkSKey(nodeNwsKey);
lmh_setAppSKey(nodeAppsKey);
lmh_setDevAddr(nodeDevAddr);
}
// Initialize LoRaWan
err_code = lmh_init(&g_lora_callbacks, g_lora_param_init, doOTAA, g_CurrentClass, g_CurrentRegion);
if (err_code != 0)
{
Serial.printf("lmh_init failed - %d\n", err_code);
return;
}
// Start Join procedure
lmh_join();
}
void loop2()
{
uint32_t i = 0;
short raw_speed;
raw_speed = get_speed();
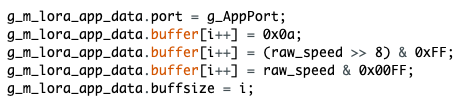
g_m_lora_app_data.port = g_AppPort;
g_m_lora_app_data.buffer[i++] = 0x0a;
g_m_lora_app_data.buffer[i++] = (raw_speed >> 8) & 0xFF;
g_m_lora_app_data.buffer[i++] = raw_speed & 0x00FF;
g_m_lora_app_data.buffsize = i;
delay(10000);
yield();
}
void loop()
{
// Put your application tasks here, like reading of sensors,
// Controlling actuators and/or other functions.
}
/**@brief LoRa function for handling HasJoined event.
*/
void lorawan_has_joined_handler(void)
{
Serial.println("OTAA Mode, Network Joined!");
lmh_error_status ret = lmh_class_request(g_CurrentClass);
if (ret == LMH_SUCCESS)
{
delay(1000);
TimerSetValue(&g_appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&g_appTimer);
}
}
/**@brief LoRa function for handling OTAA join failed
*/
static void lorawan_join_failed_handler(void)
{
Serial.println("OTAA join failed!");
Serial.println("Check your EUI's and Keys's!");
Serial.println("Check if a Gateway is in range!");
}
/**@brief Function for handling LoRaWan received data from Gateway
*
* @param[in] app_data Pointer to rx data
*/
void lorawan_rx_handler(lmh_app_data_t *app_data)
{
Serial.printf("LoRa Packet received on port %d, size:%d, rssi:%d, snr:%d, data:%s\n",
app_data->port, app_data->buffsize, app_data->rssi, app_data->snr, app_data->buffer);
}
void lorawan_confirm_class_handler(DeviceClass_t Class)
{
Serial.printf("switch to class %c done\n", "ABC"[Class]);
// Informs the server that switch has occurred ASAP
g_m_lora_app_data.buffsize = 0;
g_m_lora_app_data.port = g_AppPort;
lmh_send(&g_m_lora_app_data, g_CurrentConfirm);
}
short get_speed(void)
{
short rawspeed;
float speed;
/* RS485 Power On */
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, HIGH);
delay(100);
/* RS485 Power On */
if (!ModbusRTUClient.requestFrom(1, HOLDING_REGISTERS, 0x0016, 1))
{
Serial.print("failed to read registers! ");
Serial.println(ModbusRTUClient.lastError());
}
else
{
// If the request succeeds, the sensor sends the readings, that are
// stored in the holding registers. The read() method can be used to
// get the raw pH values.
rawspeed = ModbusRTUClient.read();
// To get the ph reading as a percentage, divide the raw value by 10.0.
speed = rawspeed / 10.0;
Serial.printf("-------speed------ = %f\n", speed);
}
/* RS485 Power Off */
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, LOW);
delay(100);
/* RS485 Power Off */
return rawspeed;
}
void send_lora_frame(void)
{
if (lmh_join_status_get() != LMH_SET)
{
//Not joined, try again later
return;
}
lmh_error_status error = lmh_send(&g_m_lora_app_data, g_CurrentConfirm);
if (error == LMH_SUCCESS)
{
g_count++;
Serial.printf("lmh_send ok count %d\n", g_count);
}
else
{
g_count_fail++;
Serial.printf("lmh_send fail count %d\n", g_count_fail);
}
}
/**@brief Function for handling user timerout event.
*/
void tx_lora_periodic_handler(void)
{
TimerSetValue(&g_appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&g_appTimer);
Serial.println("Sending frame now...");
send_lora_frame();
}
/**@brief Function for the Timer initialization.
*
* @details Initializes the timer module. This creates and starts application timers.
*/
uint32_t timers_init(void)
{
TimerInit(&g_appTimer, tx_lora_periodic_handler);
return 0;
}
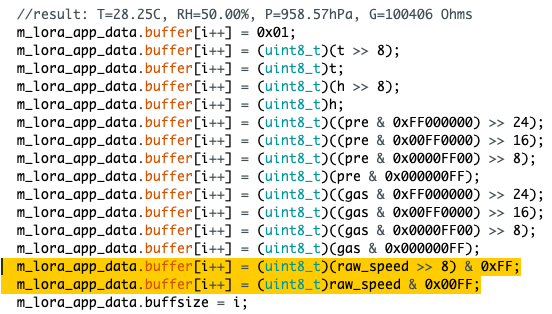
What are the bare minimal parts of this wind speed code that I need to pull out and insert into my environment code to get this project to run correctly? This is my first time merging two parts of Arduino code like this, so I apologize if I am asking a basic question in advanced!