Please include the following information, in order for us to help you as effectively as possible.
-
What product do you wish to discuss? RAK4631
-
What firmware are you using? VSCode/PlatformIO
-
What firmware version? No support do AT, Arduino BSP
-
Computer OS? (MacOS, Linux, Windows) Windows
-
What Computer OS version? Windows 11
-
How often does the problem happen? Yes
-
How can we replicate the problem? Yes
-
Provide source code if custom firmware is used or link to example if RAKwireless example code is used.
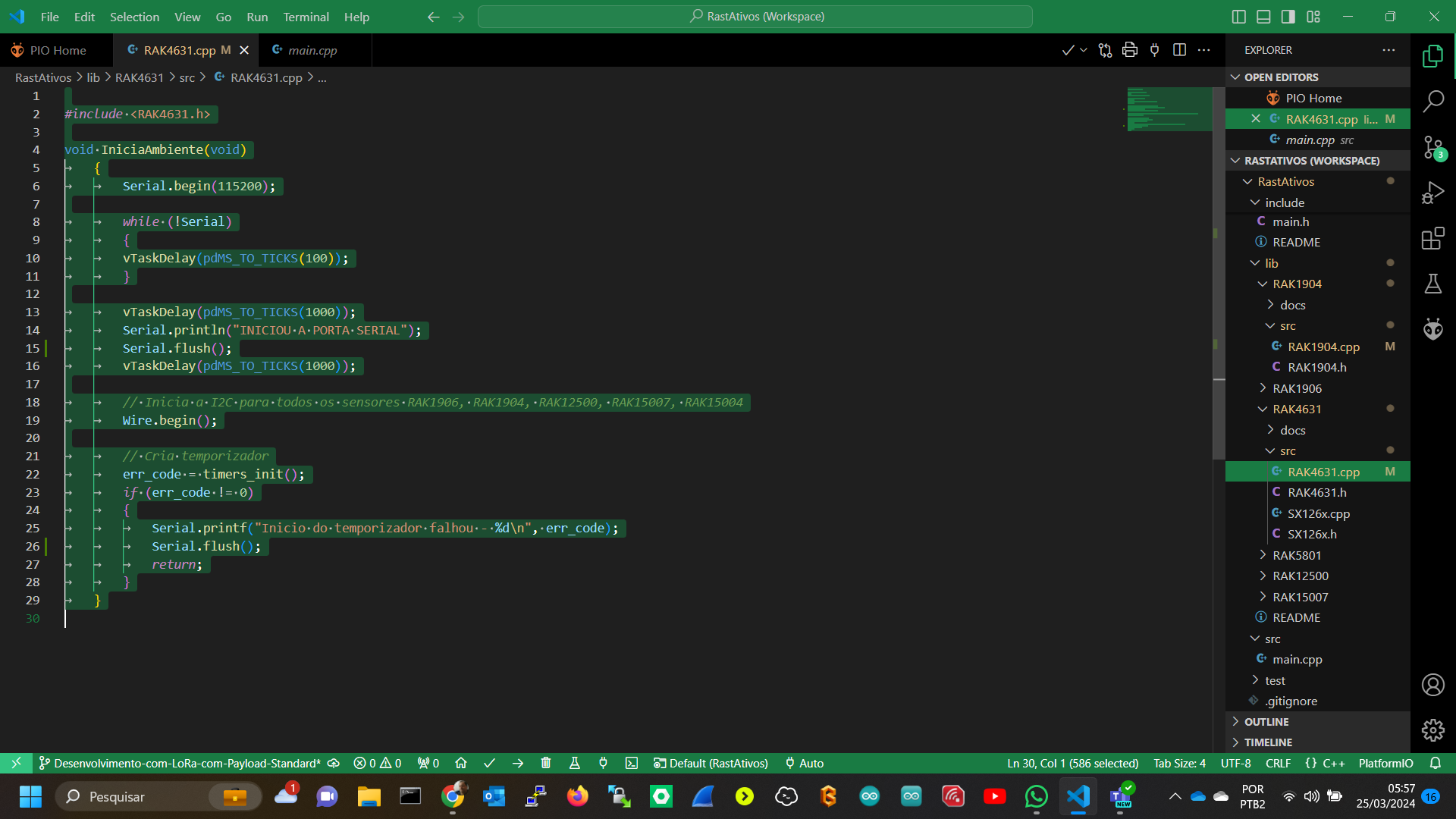
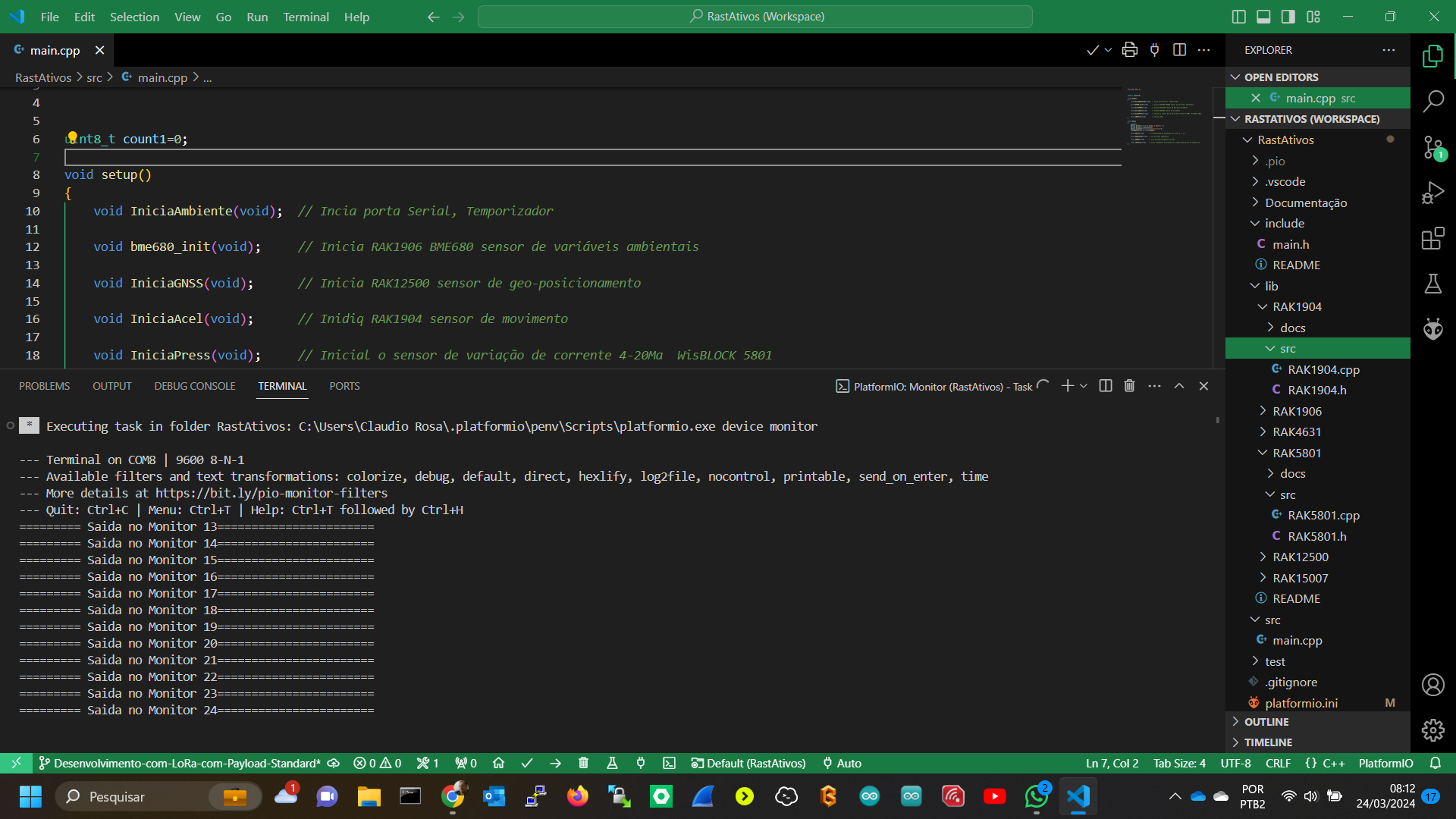
I had a code in traditional shape “setup and loop”, but when I split the code in Libraries, no serial monitor output is working. The monitor serial output that I get, it is a “serial.print” that I have in the “loop()”
I already tried to change the “monitor_dtr = 0 and monitor_rts = 0”, but no effect.
Any ideas?
The partial code is below:
How the code was splited in Libraries:
The serial monitor output:
Platformio.ini
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[upload_settings]
device_eui = '0xAC, 0x1F, 0x09, 0xFF, 0xFE, 0x0C, 0xF0, 0x41'
app_eui = '0xAC, 0x1F, 0x09, 0xFF, 0x00, 0x00, 0x00, 0x02'
app_key = '0x4B, 0x41, 0x70, 0x70, 0x6C, 0x69, 0x63, 0x61, 0x74, 0x69, 0x6F, 0x6E, 0x20, 0x4B, 0x65, 0x79'
[env:wiscore_rak4631]
platform = nordicnrf52
board = wiscore_rak4631
framework = arduino
; upload_port = COM16
; monitor_speed = 115200
; monitor_dtr = 0
; monitor_rts = 0
lib_deps =
sparkfun/SparkFun LIS3DH Arduino Library @ ^1.0.3
adafruit/Adafruit BME680 Library @ ^2.0.4
sparkfun/SparkFun u-blox GNSS Arduino Library @ ^2.2.25
beegee-tokyo/SX126x-Arduino @ ^2.0.24
; build_type = debug
build_flags =
; -DCFG_DEBUG=2
-D MONITOR_SPEED=115200
-D UPLOAD_SPEED=115200
; LEDs
-D LED_GREEN=35
-D PIN_LED1=35
-D LED_BLUE=36
-D PIN_LED2=36
-D LED_STATE_ON=1
; calibração das variáveis ambientais
-D SEALEVELPRESSURE_HPA=1010.0
; Desabilitar INT1/INT2 no RAK1904 para evitar conflito com RAK5801
; INT1 de RAK1904
; -D LIS3DH_CTRL_REG3=0x25
; INT2 de RAK1904 .
; -D LIS3DH_CTRL_REG6=0x25
; LoRa
-D SCHED_MAX_EVENT_DATA_SIZE=APP_TIMER_SCHED_EVENT_DATA_SIZE ; /**< Maximum size of scheduler events. */
-D SCHED_QUEUE_SIZE=60 ; /**< Maximum number of events in the scheduler queue. */
-D LORAWAN_DATERATE=DR_0
-D LORAWAN_TX_POWER=TX_POWER_0
-D JOINREQ_NBTRIALS=3
-D DEV_EUI=${upload_settings.device_eui}
-D APP_EUI=${upload_settings.app_eui}
-D APP_KEY=${upload_settings.app_key}
; Private defination
-D LORAWAN_APP_DATA_BUFF_SIZE=64 ; tamanho do buffer para o payload a ser enviado via LoRa
-D LORAWAN_APP_INTERVAL=20000 ; definição do temporizador do intervalo de transmissão dos dados da aplicação. 20 mili segundos>
The main.h:
/*
* 1) rastreador baseado em GPS: latitude, longitude e altura
* 2) um acelerômetro: quantidade de movimento
* 3) medição de variáveis ambientais: temperatura e humidade
* 4) pressão duas linhas pneumáticas: através da leitura de um transdutor de pressão para variação de corrente 4-20 mA
*/
// bibliotecas do sistema
#ifndef _ARDUINO_H
#define _ARDUINO_H
#include <Arduino.h>
#endif
#ifndef _STDINT_H
#define _STDINT_H
#include <stdint.h> // usa int sem sinal, por exemplo uint8_t, que ocupa apenas 1 byte
#endif
#ifndef _WIRE_H
#define _WIRE_H
#include <Wire.h>
#endif
#ifndef _SPI_H
#define _SPI_H
#include <SPI.h>
#endif
// Bibliotecas personalizadas
#include <RAK4631.h>
#include <RAK1904.h>
#include <RAK1906.h>
#include <RAK12500.h>
#include <RAK15007.h>
/*
// sensores
class Sensores
{
public:
String TipoMod [5] = {"RAK4631","RAK1904","RAK1906","RAK5801","RAK12500"};
uint8_t BatInt, BatDec, HumVal, TempInt, TempDec, PresBarInt, PresBarDec ;
uint8_t BatCarga [5] = {1,116,BatInt,BatDec,0};
uint8_t Hum [4] = {6,104,HumVal,2};
uint8_t Temp [5] = {7,103,TempInt,TempDec,2};
uint8_t PresBar [5] = {8,115,PresBarInt, PresBarDec,2};
};
*/
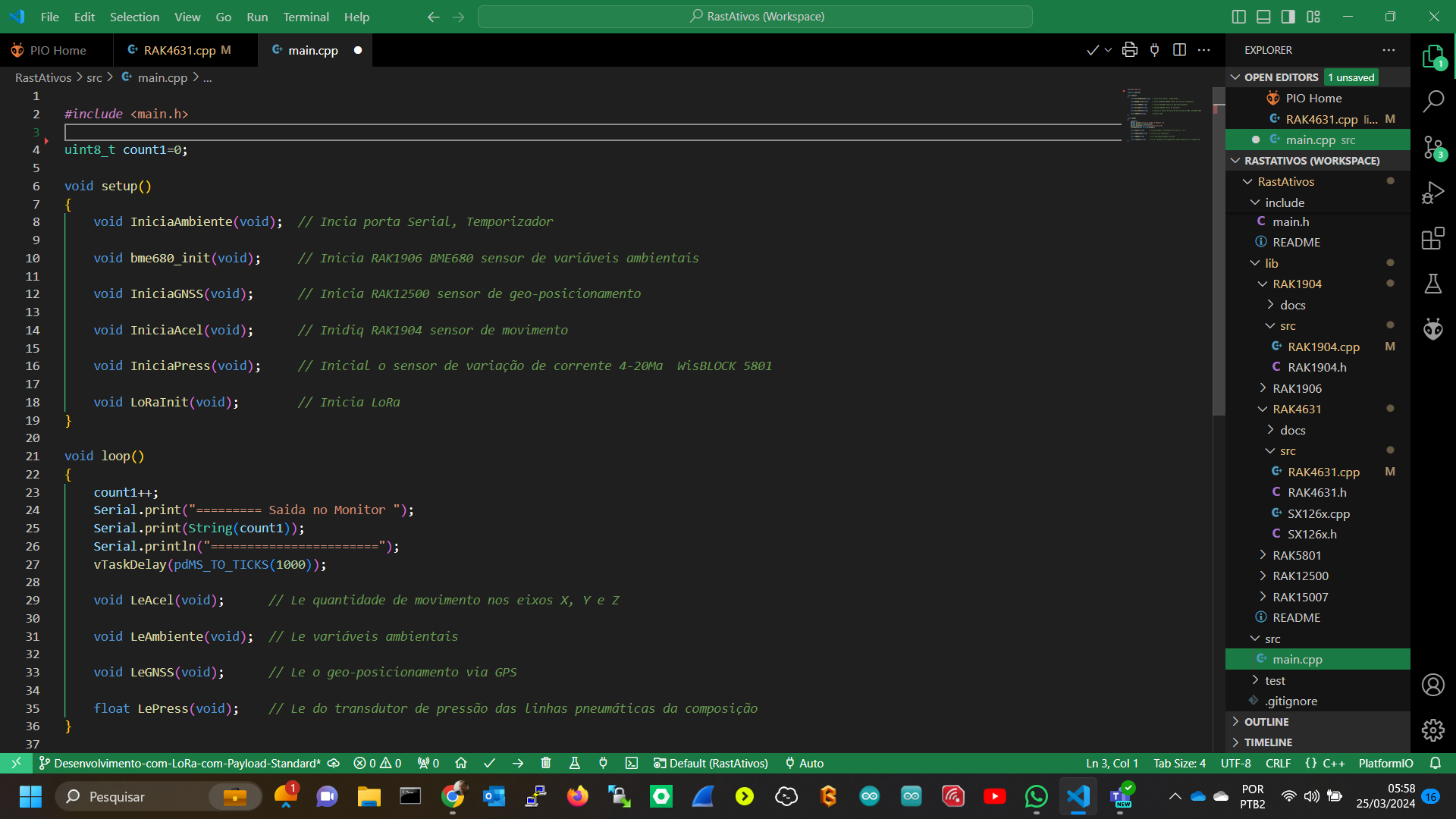
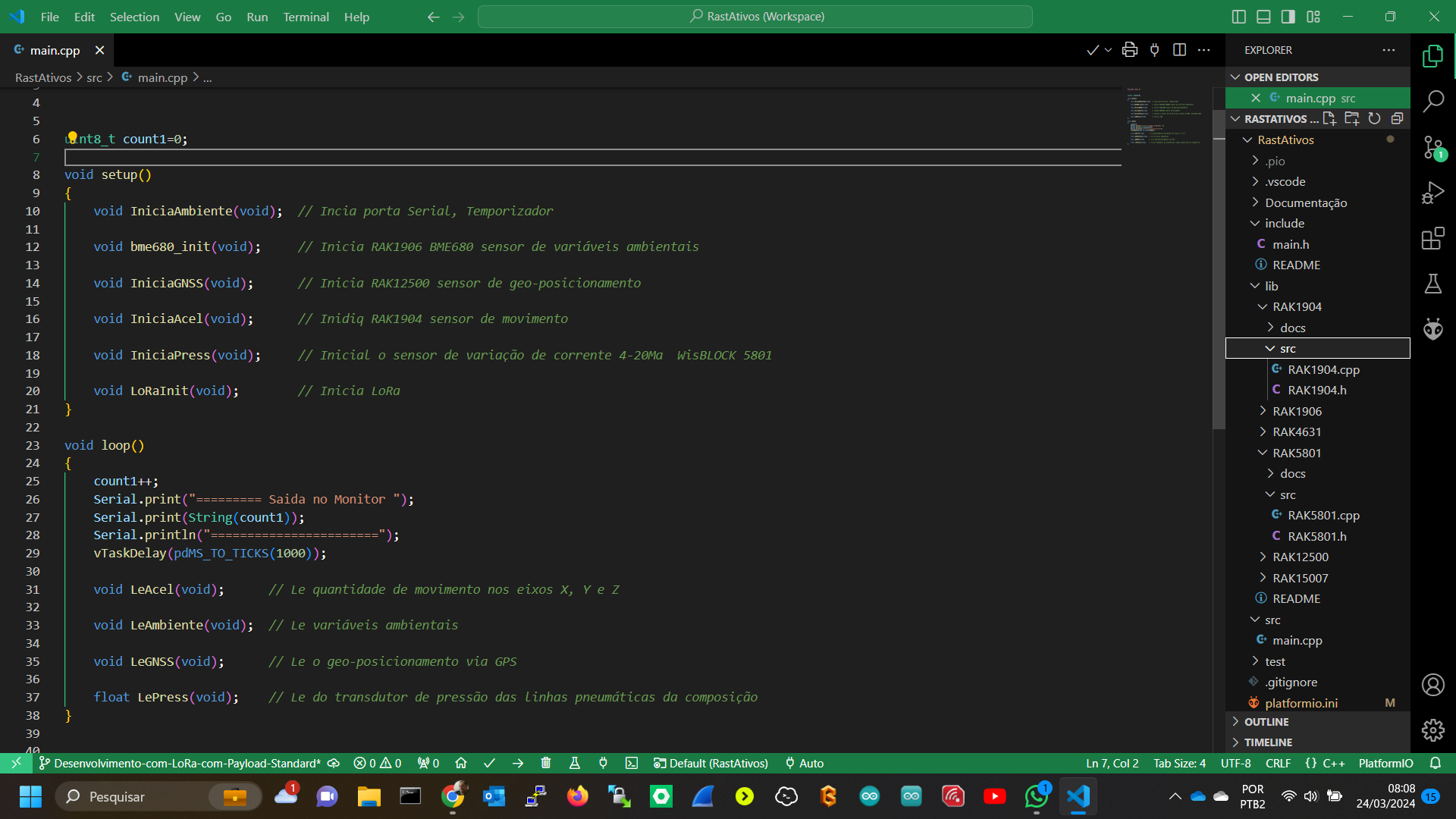
The main.cpp:
#include <main.h>
uint8_t count1=0;
void setup()
{
void IniciaAmbiente(void); // Incia porta Serial, Temporizador
void bme680_init(void); // Inicia RAK1906 BME680 sensor de variáveis ambientais
void IniciaGNSS(void); // Inicia RAK12500 sensor de geo-posicionamento
void IniciaAcel(void); // Inidiq RAK1904 sensor de movimento
void IniciaPress(void); // Inicial o sensor de variação de corrente 4-20Ma WisBLOCK 5801
void LoRaInit(void); // Inicia LoRa
}
void loop()
{
count1++;
Serial.print("========= Saida no Monitor ");
Serial.print(String(count1));
Serial.println("=======================");
vTaskDelay(pdMS_TO_TICKS(1000));
void LeAcel(void); // Le quantidade de movimento nos eixos X, Y e Z
void LeAmbiente(void); // Le variáveis ambientais
void LeGNSS(void); // Le o geo-posicionamento via GPS
float LePress(void); // Le do transdutor de pressão das linhas pneumáticas da composição
}
The RAK1904 library:
RAK1904.h
#ifndef _RAK1904_H
#define _RAK1904_H
// bibliotecas do sistema
#ifndef _ARDUINO_H
#define _ARDUINO_H
#include <Arduino.h>
#endif
#ifndef _STDINT_H
#define _STDINT_H
#include <stdint.h> // usa int sem sinal, por exemplo uint8_t, que ocupa apenas 1 byte
#endif
#ifndef _WIRE_H
#define _WIRE_H
#include <Wire.h>
#endif
// Bibliotecas do Firmware
// RAK1904 acelerômetro
#include <SparkFunLIS3DH.h> //http://librarymanager/All#SparkFun-LIS3DH
LIS3DH SensorTwo(I2C_MODE, 0x18);
void IniciaAcel(void);
void LeAcel(void);
#endif
RAK1904.cpp
#include <RAK1904.h>
void IniciaAcel(void)
{
if (SensorTwo.begin() != 0)
{
Serial.println("Problema iniciar o sensor no endereço 0x18.");
}
else
{
Serial.println("Sensor iniciado no endereço RAK1904 no endereço 0x18.");
// Set low power mode
uint8_t data_to_write = 0;
SensorTwo.readRegister(&data_to_write, LIS3DH_CTRL_REG1);
data_to_write |= 0x08;
SensorTwo.writeRegister(LIS3DH_CTRL_REG1, data_to_write);
vTaskDelay(pdMS_TO_TICKS(100));
data_to_write = 0;
SensorTwo.readRegister(&data_to_write, 0x1E);
data_to_write |= 0x90;
SensorTwo.writeRegister(0x1E, data_to_write);
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void LeAcel(void)
{
// Le quantidade de movimento
Serial.println("========= Quantidade de Movimento============");
Serial.print(" X(g) = ");
Serial.println(SensorTwo.readFloatAccelX(), 4);
Serial.print(" Y(g) = ");
Serial.println(SensorTwo.readFloatAccelY(), 4);
Serial.print(" Z(g)= ");
Serial.println(SensorTwo.readFloatAccelZ(), 4);
vTaskDelay(pdMS_TO_TICKS(1000));
}