/**
* @file GPS_Tracker.ino
* @author rakwireless.com
* @brief This sketch demonstrate a GPS tracker that collect location from a uBlox M7 GNSS sensor
* and send the data to lora gateway.
* It uses a 3-axis acceleration sensor to detect movement of the tracker
* @version 0.2
* @date 2021-04-30
*
* @copyright Copyright (c) 2020
*
* @note RAK4631 GPIO mapping to nRF52840 GPIO ports
RAK4631 <-> nRF52840
WB_IO1 <-> P0.17 (GPIO 17)
WB_IO2 <-> P1.02 (GPIO 34)
WB_IO3 <-> P0.21 (GPIO 21)
WB_IO4 <-> P0.04 (GPIO 4)
WB_IO5 <-> P0.09 (GPIO 9)
WB_IO6 <-> P0.10 (GPIO 10)
WB_SW1 <-> P0.01 (GPIO 1)
WB_A0 <-> P0.04/AIN2 (AnalogIn A2)
WB_A1 <-> P0.31/AIN7 (AnalogIn A7)
*/
#include <Arduino.h>
#include <LoRaWan-RAK4630.h> //http://librarymanager/All#SX126x
#include <SPI.h>
#include "SparkFunLIS3DH.h" //http://librarymanager/All#SparkFun-LIS3DH
#include "Wire.h"
#include <TinyGPS.h> //http://librarymanager/All#TinyGPS
#include "SparkFun_SHTC3.h" // Click here to get the library: http://librarymanager/All#SparkFun_SHTC3
SHTC3 g_shtc3; // Declare an instance of the SHTC3 class
LIS3DH SensorTwo(I2C_MODE, 0x18);
TinyGPS gps;
String tmp_data = "";
int direction_S_N = 0; //0--S, 1--N
int direction_E_W = 0; //0--E, 1--W
// RAK4630 supply two LED
#ifndef LED_BUILTIN
#define LED_BUILTIN 35
#endif
#ifndef LED_BUILTIN2
#define LED_BUILTIN2 36
#endif
bool doOTAA = true; // OTAA is used by default.
#define SCHED_MAX_EVENT_DATA_SIZE APP_TIMER_SCHED_EVENT_DATA_SIZE /**< Maximum size of scheduler events. */
#define SCHED_QUEUE_SIZE 60 /**< Maximum number of events in the scheduler queue. */
#define LORAWAN_DATERATE DR_0 /*LoRaMac datarates definition, from DR_0 to DR_5*/
#define LORAWAN_TX_POWER TX_POWER_5 /*LoRaMac tx power definition, from TX_POWER_0 to TX_POWER_15*/
#define JOINREQ_NBTRIALS 3 /**< Number of trials for the join request. */
DeviceClass_t gCurrentClass = CLASS_A; /* class definition*/
LoRaMacRegion_t gCurrentRegion = LORAMAC_REGION_US915; /* Region:EU868*/
lmh_confirm gCurrentConfirm = LMH_UNCONFIRMED_MSG; /* confirm/unconfirm packet definition*/
uint8_t gAppPort = LORAWAN_APP_PORT; /* data port*/
/**@brief Structure containing LoRaWan parameters, needed for lmh_init()
*/
static lmh_param_t lora_param_init = {LORAWAN_ADR_ON, LORAWAN_DATERATE, LORAWAN_PUBLIC_NETWORK, JOINREQ_NBTRIALS, LORAWAN_TX_POWER, LORAWAN_DUTYCYCLE_OFF};
// Foward declaration
static void lorawan_has_joined_handler(void);
static void lorawan_join_failed_handler(void);
static void lorawan_rx_handler(lmh_app_data_t *app_data);
static void lorawan_confirm_class_handler(DeviceClass_t Class);
static void send_lora_frame(void);
/**@brief Structure containing LoRaWan callback functions, needed for lmh_init()
*/
static lmh_callback_t lora_callbacks = {BoardGetBatteryLevel, BoardGetUniqueId, BoardGetRandomSeed,
lorawan_rx_handler, lorawan_has_joined_handler, lorawan_confirm_class_handler, lorawan_join_failed_handler
};
//OTAA keys !!!! KEYS ARE MSB !!!!
// ABP keys
uint32_t nodeDevAddr = 0x260116F8;
uint8_t nodeNwsKey[16] = {0x7E, 0xAC, 0xE2, 0x55, 0xB8, 0xA5, 0xE2, 0x69, 0x91, 0x51, 0x96, 0x06, 0x47, 0x56, 0x9D, 0x23};
uint8_t nodeAppsKey[16] = {0xFB, 0xAC, 0xB6, 0x47, 0xF3, 0x58, 0x45, 0xC7, 0x50, 0x7D, 0xBF, 0x16, 0x8B, 0xA8, 0xC1, 0x7C};
// Private defination
#define LORAWAN_APP_DATA_BUFF_SIZE 64 /**< buffer size of the data to be transmitted. */
#define LORAWAN_APP_INTERVAL 10000 /**< Defines for user timer, the application data transmission interval. 10s, value in [ms]. */
static uint8_t m_lora_app_data_buffer[LORAWAN_APP_DATA_BUFF_SIZE]; //< Lora user application data buffer.
static lmh_app_data_t m_lora_app_data = {m_lora_app_data_buffer, 0, 0, 0, 0}; //< Lora user application data structure.
TimerEvent_t appTimer;
static uint32_t timers_init(void);
static uint32_t count = 0;
static uint32_t count_fail = 0;
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
// Initialize Serial for debug output
time_t timeout = millis();
Serial.begin(115200);
while (!Serial)
{
if ((millis() - timeout) < 5000)
{
delay(100);
}
else
{
break;
}
}
// Initialize LoRa chip.
lora_rak4630_init();
Serial.println("=====================================");
Serial.println("Welcome to RAK4630 LoRaWan!!!");
if (doOTAA)
{
Serial.println("Type: OTAA");
}
else
{
Serial.println("Type: ABP");
}
switch (gCurrentRegion)
{
case LORAMAC_REGION_AS923:
Serial.println("Region: AS923");
break;
case LORAMAC_REGION_AU915:
Serial.println("Region: AU915");
break;
case LORAMAC_REGION_CN470:
Serial.println("Region: CN470");
break;
case LORAMAC_REGION_CN779:
Serial.println("Region: CN779");
break;
case LORAMAC_REGION_EU433:
Serial.println("Region: EU433");
break;
case LORAMAC_REGION_IN865:
Serial.println("Region: IN865");
break;
case LORAMAC_REGION_EU868:
Serial.println("Region: EU868");
break;
case LORAMAC_REGION_KR920:
Serial.println("Region: KR920");
break;
case LORAMAC_REGION_US915:
Serial.println("Region: US915");
break;
case LORAMAC_REGION_RU864:
Serial.println("Region: RU864");
break;
case LORAMAC_REGION_AS923_2:
Serial.println("Region: AS923-2");
break;
case LORAMAC_REGION_AS923_3:
Serial.println("Region: AS923-3");
break;
case LORAMAC_REGION_AS923_4:
Serial.println("Region: AS923-4");
break;
}
Serial.println("=====================================");
//lis3dh init
if (SensorTwo.begin() != 0)
{
Serial.println("Problem starting the sensor at 0x18.");
}
else
{
Serial.println("Sensor at 0x18 started.");
// Set low power mode
uint8_t data_to_write = 0;
SensorTwo.readRegister(&data_to_write, LIS3DH_CTRL_REG1);
data_to_write |= 0x08;
SensorTwo.writeRegister(LIS3DH_CTRL_REG1, data_to_write);
delay(100);
data_to_write = 0;
SensorTwo.readRegister(&data_to_write, 0x1E);
data_to_write |= 0x90;
SensorTwo.writeRegister(0x1E, data_to_write);
delay(100);
}
//gps init
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, 0);
delay(1000);
digitalWrite(WB_IO2, 1);
delay(1000);
Serial1.begin(9600);
while (!Serial1);
Serial.println("gps uart init ok!");
//creat a user timer to send data to server period
uint32_t err_code;
err_code = timers_init();
if (err_code != 0)
{
Serial.printf("timers_init failed - %d\n", err_code);
return;
}
// Setup the EUIs and Keys
if (doOTAA)
{
lmh_setDevEui(nodeDeviceEUI);
lmh_setAppEui(nodeAppEUI);
lmh_setAppKey(nodeAppKey);
}
else
{
lmh_setNwkSKey(nodeNwsKey);
lmh_setAppSKey(nodeAppsKey);
lmh_setDevAddr(nodeDevAddr);
}
// Initialize LoRaWan
err_code = lmh_init(&lora_callbacks, lora_param_init, doOTAA, gCurrentClass, gCurrentRegion);
if (err_code != 0)
{
Serial.printf("lmh_init failed - %d\n", err_code);
return;
}
// Start Join procedure
lmh_join();
}
{
time_t timeout = millis();
Serial.begin(115200);
while (!Serial)
{
if ((millis() - timeout) < 5000)
{
delay(100);
}
else
{
break;
}
}
Wire.begin();
Serial.println("shtc3 init");
Serial.print("Beginning sensor. Result = "); // Most SHTC3 functions return a variable of the type "SHTC3_Status_TypeDef" to indicate the status of their execution
errorDecoder(g_shtc3.begin()); // To start the sensor you must call "begin()", the default settings use Wire (default Arduino I2C port)
Wire.setClock(400000); // The sensor is listed to work up to 1 MHz I2C speed, but the I2C clock speed is global for all sensors on that bus so using 400kHz or 100kHz is recommended
Serial.println();
if (g_shtc3.passIDcrc) // Whenever data is received the associated checksum is calculated and verified so you can be sure the data is true
{ // The checksum pass indicators are: passIDcrc, passRHcrc, and passTcrc for the ID, RH, and T readings respectively
Serial.print("ID Passed Checksum. ");
Serial.print("Device ID: 0b");
Serial.println(g_shtc3.ID, BIN); // The 16-bit device ID can be accessed as a member variable of the object
}
else
{
Serial.println("ID Checksum Failed. ");
}
}
void loop()
{
shtc3_read_data();
delay(1000);
}
/**@brief LoRa function for handling HasJoined event.
*/
void lorawan_has_joined_handler(void)
{
if(doOTAA == true)
{
Serial.println("OTAA Mode, Network Joined!");
}
else
{
Serial.println("ABP Mode");
}
lmh_error_status ret = lmh_class_request(gCurrentClass);
if (ret == LMH_SUCCESS)
{
delay(1000);
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
}
}
/**@brief LoRa function for handling OTAA join failed
*/
static void lorawan_join_failed_handler(void)
{
Serial.println("OTAA join failed!");
Serial.println("Check your EUI's and Keys's!");
Serial.println("Check if a Gateway is in range!");
}
/**@brief Function for handling LoRaWan received data from Gateway
*
* @param[in] app_data Pointer to rx data
*/
void lorawan_rx_handler(lmh_app_data_t *app_data)
{
Serial.printf("LoRa Packet received on port %d, size:%d, rssi:%d, snr:%d, data:%s\n",
app_data->port, app_data->buffsize, app_data->rssi, app_data->snr, app_data->buffer);
}
void lorawan_confirm_class_handler(DeviceClass_t Class)
{
Serial.printf("switch to class %c done\n", "ABC"[Class]);
// Informs the server that switch has occurred ASAP
m_lora_app_data.buffsize = 0;
m_lora_app_data.port = gAppPort;
lmh_send(&m_lora_app_data, gCurrentConfirm);
}
void send_lora_frame(void)
{
if (lmh_join_status_get() != LMH_SET)
{
//Not joined, try again later
return;
}
lmh_error_status error = lmh_send(&m_lora_app_data, gCurrentConfirm);
if (error == LMH_SUCCESS)
{
count++;
Serial.printf("lmh_send ok count %d\n", count);
}
else
{
count_fail++;
Serial.printf("lmh_send fail count %d\n", count_fail);
}
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
}
/**@brief Function for analytical direction.
*/
void direction_parse(String tmp)
{
if (tmp.indexOf(",E,") != -1)
{
direction_E_W = 0;
}
else
{
direction_E_W = 1;
}
if (tmp.indexOf(",S,") != -1)
{
direction_S_N = 0;
}
else
{
direction_S_N = 1;
}
}
/**@brief Function for handling a LoRa tx timer timeout event.
*/
String data = "";
void tx_lora_periodic_handler(void)
{
float x = 0;
float y = 0;
float z = 0;
bool newData = false;
Serial.println("check acc!");
x = SensorTwo.readFloatAccelX() * 1000;
y = SensorTwo.readFloatAccelY() * 1000;
z = SensorTwo.readFloatAccelZ() * 1000;
data = "X = " + String(x) + "mg" + " Y = " + String(y) + "mg" + " Z =" + String(z) + "mg";
Serial.println(data);
data = "";
if( abs(x-z) < 400)
{
// For one second we parse GPS data and report some key values
for (unsigned long start = millis(); millis() - start < 1000;)
{
while (Serial1.available())
{
char c = Serial1.read();
Serial.write(c); // uncomment this line if you want to see the GPS data flowing
tmp_data += c;
if (gps.encode(c))// Did a new valid sentence come in?
newData = true;
}
}
direction_parse(tmp_data);
tmp_data = "";
float flat, flon;
int32_t ilat, ilon;
if (newData)
{
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat;
ilat = flat * 100000;
Serial.println('Latitude', ilat);
flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon;
ilon = flon * 100000;
Serial.println('Longitude', ilon);
memset(m_lora_app_data.buffer, 0, LORAWAN_APP_DATA_BUFF_SIZE);
m_lora_app_data.port = gAppPort;
m_lora_app_data.buffer[0] = 0x09;
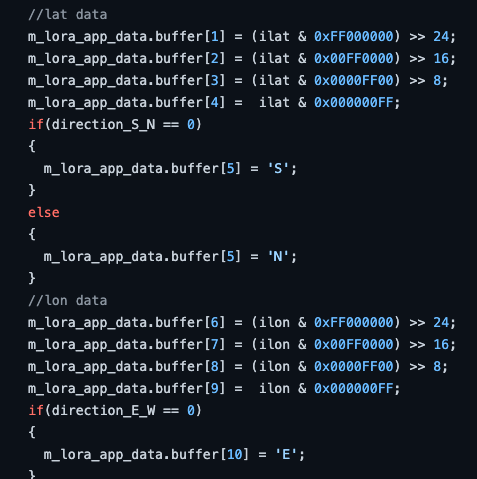
//lat data
m_lora_app_data.buffer[1] = (ilat & 0xFF000000) >> 24;
m_lora_app_data.buffer[2] = (ilat & 0x00FF0000) >> 16;
m_lora_app_data.buffer[3] = (ilat & 0x0000FF00) >> 8;
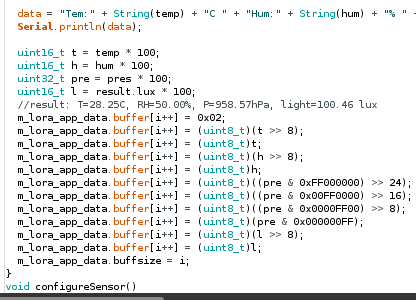
m_lora_app_data.buffer[i++] = (uint8_t)(t >> 8);
m_lora_app_data.buffer[i++] = (uint8_t)t;
m_lora_app_data.buffer[4] = ilat & 0x000000FF;
if(direction_S_N == 0)
{
m_lora_app_data.buffer[5] = 'S';
}
else
{
m_lora_app_data.buffer[5] = 'N';
}
//lon data
m_lora_app_data.buffer[6] = (ilon & 0xFF000000) >> 24;
m_lora_app_data.buffer[7] = (ilon & 0x00FF0000) >> 16;
m_lora_app_data.buffer[8] = (ilon & 0x0000FF00) >> 8;
m_lora_app_data.buffer[9] = ilon & 0x000000FF;
if(direction_E_W == 0)
{
m_lora_app_data.buffer[10] = 'E';
}
else
{
m_lora_app_data.buffer[10] = 'W';
}
m_lora_app_data.buffsize = 11;
send_lora_frame();
}
else
{
Serial.println("No Location Found");
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
}
}
else
{
Serial.println("Turn WisBlock with USB pointing up to start location search");
TimerSetValue(&appTimer, LORAWAN_APP_INTERVAL);
TimerStart(&appTimer);
}
}
/**@brief Function for the Timer initialization.
*
* @details Initializes the timer module. This creates and starts application timers.
*/
uint32_t timers_init(void)
{
TimerInit(&appTimer, tx_lora_periodic_handler);
return 0;
}
Here is the code that is messed up where I am trying to combine it all. Once I figure out how to combine stuff I’ll be good I just want to understand how and why I add the parts from one example into the setup and reference the functions into the lora part