I am experiencing massive problems uploading code to my RAK3172 board. I am able to upload the code only once. Whenever I try to upload the code the second time, the upload process gets stuck at “Detecting Baudrate…” and then “Detect Baudrate fail, can not get the baudrate” (screenshot). When I try to send AT commands over Serial Monitor (115200 baud) I get no response (9600 as well just to be sure).
The connection to TTN is fine though (as observed from TTN console).
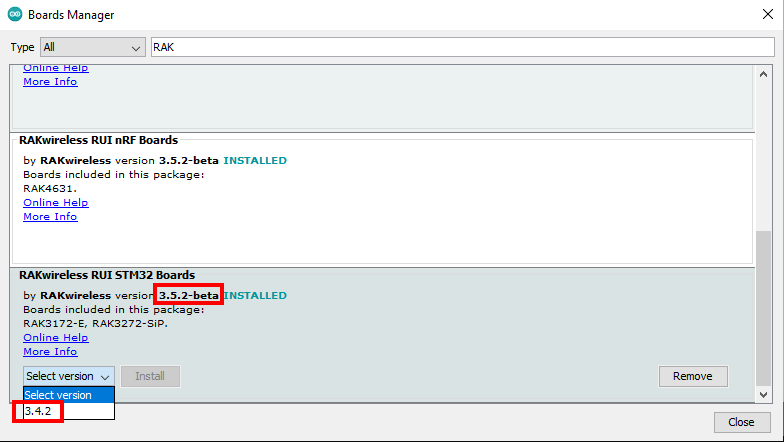
What is very annoying and strange is that I am able to upload code normally after I re-flash the firmware over DFU. Is there something going on with the way the RUI3 configures the Serial port such that it cannot be used to upload further code after it has been repurposed for Serial communication? Am I supposed to set the mode of Serial.begin() to RAK_API_MODE or RAK_DEFAULT_MODE? Seems very strange to me.
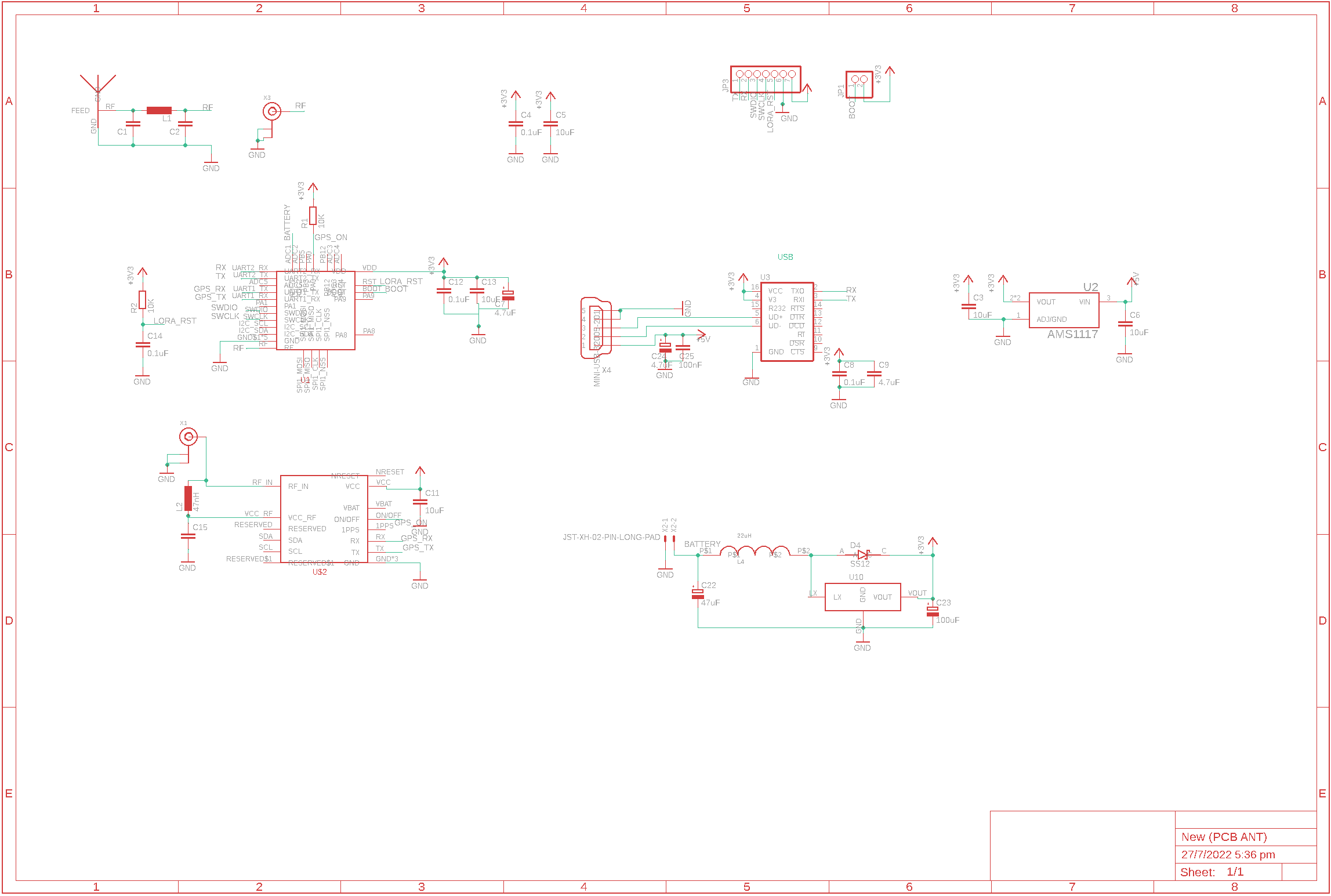
Anyways, here is the full code as well as the schematic of my custom PCB. Any help would be greatly appreciated.
#include <TinyGPS++.h>
TinyGPSPlus gps;
#define OTAA_BAND (RAK_REGION_AS923)
#define OTAA_DEVEUI {0xAC, 0x1F, 0x09, 0xFF, 0xFE, 0x07, 0x81, 0x2B}
#define OTAA_APPEUI {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}
#define OTAA_APPKEY {0xD7, 0x65, 0xB7, 0x92, 0x5E, 0x9B, 0x82, 0x07, 0x84, 0x65, 0x6A, 0xE5, 0x55, 0x3C, 0x42, 0x0A}
#define OTAA_PERIOD 600000
uint8_t message[64] = { 0 };
uint64_t last = 0;
long latDec; //latDec = lattitude * 100000
long longDec; //longDec = longitude * 100000
unsigned int battery; //battery = voltage * 100
uint8_t latIsNegative;
uint8_t longIsNegative;
uint8_t latArray[3] = {0,0,0};
uint8_t longArray[3] = {0,0,0};
float GPSLatArray[10];
float GPSLongArray[10];
void recvCallback(SERVICE_LORA_RECEIVE_T * data)
{
if (data->BufferSize > 0) {
Serial.println("Something received!");
for (int i = 0; i < data->BufferSize; i++) {
Serial.printf("%x", data->Buffer[i]);
}
Serial.print("\r\n");
}
}
void joinCallback(int32_t status)
{
Serial.printf("Join status: %d\r\n", status);
}
void sendCallback(int32_t status)
{
if (status == 0) {
Serial.println("Successfully sent");
} else {
Serial.println("Sending failed");
}
}
void setup() {
// put your setup code here, to run once:
Serial.begin(115200, RAK_CUSTOM_MODE);
Serial1.begin(9600, RAK_CUSTOM_MODE);
Serial.println("Ready");
pinMode(29, OUTPUT);
pinMode(32, INPUT);
// OTAA Device EUI MSB first
uint8_t node_device_eui[8] = OTAA_DEVEUI;
// OTAA Application EUI MSB first
uint8_t node_app_eui[8] = OTAA_APPEUI;
// OTAA Application Key MSB first
uint8_t node_app_key[16] = OTAA_APPKEY;
if (!api.lorawan.appeui.set(node_app_eui, 8)) {
Serial.printf("LoRaWan OTAA - set application EUI is incorrect! \r\n");
return;
}
if (!api.lorawan.appkey.set(node_app_key, 16)) {
Serial.printf("LoRaWan OTAA - set application key is incorrect! \r\n");
return;
}
if (!api.lorawan.deui.set(node_device_eui, 8)) {
Serial.printf("LoRaWan OTAA - set device EUI is incorrect! \r\n");
return;
}
if (!api.lorawan.band.set(OTAA_BAND)) {
Serial.printf("LoRaWan OTAA - set band is incorrect! \r\n");
return;
}
if (!api.lorawan.deviceClass.set(RAK_LORA_CLASS_A)) {
Serial.printf("LoRaWan OTAA - set device class is incorrect! \r\n");
return;
}
if (!api.lorawan.njm.set(RAK_LORA_OTAA)) // Set the network join mode to OTAA
{
Serial.printf
("LoRaWan OTAA - set network join mode is incorrect! \r\n");
return;
}
if (!api.lorawan.join()) // Join to Gateway
{
Serial.printf("LoRaWan OTAA - join fail! \r\n");
return;
}
/** Wait for Join success */
while (api.lorawan.njs.get() == 0) {
Serial.print("Wait for LoRaWAN join...");
api.lorawan.join();
delay(10000);
}
if (!api.lorawan.adr.set(true)) {
Serial.printf
("LoRaWan OTAA - set adaptive data rate is incorrect! \r\n");
return;
}
if (!api.lorawan.rety.set(1)) {
Serial.printf("LoRaWan OTAA - set retry times is incorrect! \r\n");
return;
}
if (!api.lorawan.cfm.set(1)) {
Serial.printf("LoRaWan OTAA - set confirm mode is incorrect! \r\n");
return;
}
Serial.printf("Duty cycle is %s\r\n", api.lorawan.dcs.get()? "ON" : "OFF"); // Check Duty Cycle status
Serial.printf("Packet is %s\r\n", api.lorawan.cfm.get()? "CONFIRMED" : "UNCONFIRMED"); // Check Confirm status
uint8_t assigned_dev_addr[4] = { 0 };
api.lorawan.daddr.get(assigned_dev_addr, 4);
Serial.printf("Device Address is %02X%02X%02X%02X\r\n", assigned_dev_addr[0], assigned_dev_addr[1], assigned_dev_addr[2], assigned_dev_addr[3]); // Check Device Address
Serial.printf("Uplink period is %ums\r\n", OTAA_PERIOD);
Serial.println("");
api.lorawan.registerRecvCallback(recvCallback);
api.lorawan.registerJoinCallback(joinCallback);
api.lorawan.registerSendCallback(sendCallback);
}
void uplink_routine()
{
/** Payload of Uplink */
uint8_t data_len = 0;
message[data_len++] = (uint8_t) latIsNegative;
message[data_len++] = (uint8_t) latArray[0];
message[data_len++] = (uint8_t) latArray[1];
message[data_len++] = (uint8_t) latArray[2];
message[data_len++] = (uint8_t) longIsNegative;
message[data_len++] = (uint8_t) longArray[0];
message[data_len++] = (uint8_t) longArray[1];
message[data_len++] = (uint8_t) longArray[2];
message[data_len++] = (uint8_t) battery;
Serial.println("Data Packet:");
for (int i = 0; i < data_len; i++) {
Serial.printf("0x%02X ", message[i]);
}
/** Send the data package */
if (api.lorawan.send(data_len, (uint8_t *) & message, 2, true, 1)) {
Serial.println("Sending is requested");
} else {
Serial.println("Sending failed");
}
}
void loop() {
if(millis() - last > OTAA_PERIOD){
// Simulate the collection of data:
//latDec = 12345678; //latDec = lattitude * 100000
//longDec = 12345678; //longDec = longitude * 100000
//battery = 100; //battery = voltage / 3.3 * 100
digitalWrite(29, HIGH);
delay(120000); //wait 2 min for the GPS to boot up
while(Serial1.available() > 0){
if(gps.encode(Serial1.read())){
if(gps.location.isValid()){
latDec = gps.location.lat()*100000;
longDec = gps.location.lng()*100000;
latIsNegative = (latDec<0)?1:0;
longIsNegative = (longDec<0)?1:0;
convert(abs(latDec),1,0);
convert(abs(longDec),2,0);
battery = analogRead(32)/930*100;
uplink_routine();
}else{
Serial.println("GPS is present by no valid coordinates!");
}
}else{
Serial.println("No valid GPS found");
}
}
last = millis();
digitalWrite(29, LOW);
}
api.system.sleep.all(OTAA_PERIOD);
}
void convert(long number, int flag, int index){
if(number >= 256) convert(round(number/256),flag,index+1);
if(!flag==1){
latArray[index]=number%256;
}else if(flag==2){
longArray[index]=number%256;
}
}