I had a look at the code – it is based on my code but was modified since. I even see some dubious English in the code, definitely not mine. Below is a version that works with the newer versions of RUI3 (the BW setting was changed from 125 – value in KHz – to 0, the index of {125,250,500}).
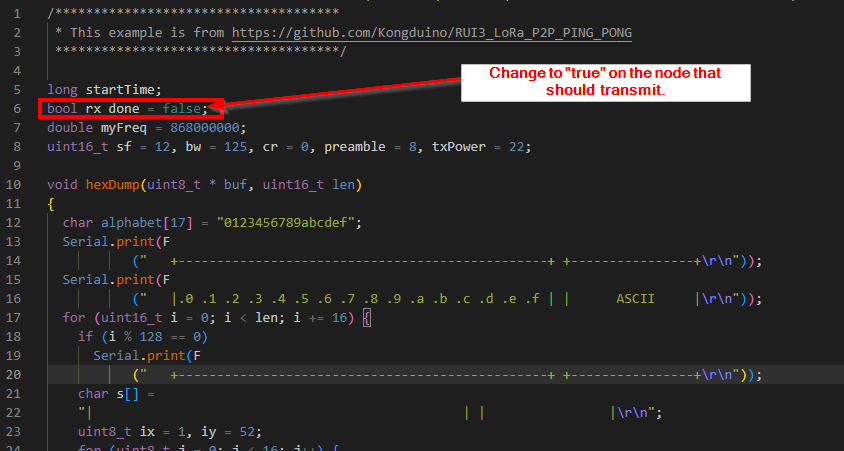
No need to touch rx_done: The last line of setup() sets a 3-second Rx timer. After 3 seconds, the receive callback recv_cb is triggered, which will set rx_done to false, and in turn will trigger a send event.
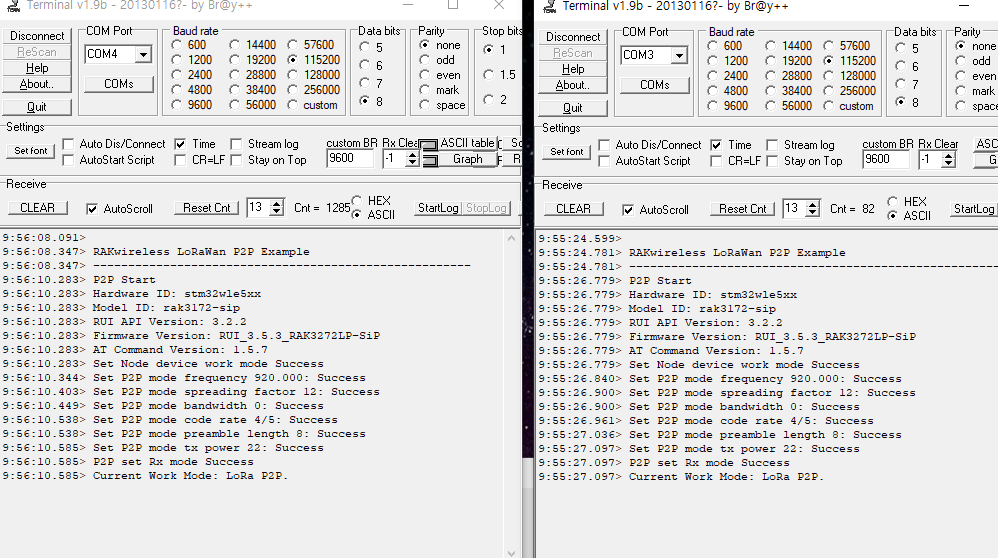
The trick in this example is that you don’t have to set any device to send or receive, they all are. What you can do is set the initial receive timer to 3 seconds in one device, and to permanent (65535) in the others, in order to have only one device kick-starting the conversation.
/*************************************
This example is from https://github.com/Kongduino/RUI3_LoRa_P2P_PING_PONG
*************************************/
long startTime;
bool rx_done = false;
double myFreq = 868000000;
uint16_t sf = 12, bw = 0, cr = 0, preamble = 8, txPower = 22;
void hexDump(uint8_t * buf, uint16_t len) {
char alphabet[17] = "0123456789abcdef";
Serial.print(F(" +------------------------------------------------+ +----------------+\r\n"));
Serial.print(F(" |.0 .1 .2 .3 .4 .5 .6 .7 .8 .9 .a .b .c .d .e .f | | ASCII |\r\n"));
for (uint16_t i = 0; i < len; i += 16) {
if (i % 128 == 0)
Serial.print(F(" +------------------------------------------------+ +----------------+\r\n"));
char s[] = "| | | |\r\n";
uint8_t ix = 1, iy = 52;
for (uint8_t j = 0; j < 16; j++) {
if (i + j < len) {
uint8_t c = buf[i + j];
s[ix++] = alphabet[(c >> 4) & 0x0F];
s[ix++] = alphabet[c & 0x0F];
ix++;
if (c > 31 && c < 128) s[iy++] = c;
else s[iy++] = '.';
}
}
uint8_t index = i / 16;
if (i < 256) Serial.write(' ');
Serial.print(index, HEX);
Serial.write('.');
Serial.print(s);
}
Serial.print(F(" +------------------------------------------------+ +----------------+\r\n"));
}
/*
typedef struct rui_lora_p2p_revc {
// Pointer to the received data stream
uint8_t *Buffer;
// Size of the received data stream
uint8_t BufferSize;
// Rssi of the received packet
int16_t Rssi;
// Snr of the received packet
int8_t Snr;
} rui_lora_p2p_recv_t;
*/
void recv_cb(rui_lora_p2p_recv_t data) {
rx_done = true;
if (data.BufferSize == 0) {
Serial.println("Empty buffer.");
return;
}
char buff[92];
sprintf(buff, "Incoming message, length: %d, RSSI: %d, SNR: %d", data.BufferSize, data.Rssi, data.Snr);
Serial.println(buff);
hexDump(data.Buffer, data.BufferSize);
}
void send_cb(void) {
Serial.printf("P2P set Rx mode %s\r\n", api.lorawan.precv(65534) ? "Success" : "Fail");
}
void setup() {
Serial.begin(115200);
Serial.println("RAKwireless LoRaWan P2P Example");
Serial.println("------------------------------------------------------");
delay(2000);
startTime = millis();
Serial.println("P2P Start");
Serial.printf("Hardware ID: %s\r\n", api.system.chipId.get().c_str());
Serial.printf("Model ID: %s\r\n", api.system.modelId.get().c_str());
Serial.printf("RUI API Version: %s\r\n", api.system.apiVersion.get().c_str());
Serial.printf("Firmware Version: %s\r\n", api.system.firmwareVersion.get().c_str());
Serial.printf("AT Command Version: %s\r\n", api.system.cliVersion.get().c_str());
Serial.printf("Set Node device work mode %s\r\n", api.lorawan.nwm.set(0) ? "Success" : "Fail");
Serial.printf("Set P2P mode frequency %3.3f: %s\r\n", (myFreq / 1e6), api.lorawan.pfreq.set(myFreq) ? "Success" : "Fail");
Serial.printf("Set P2P mode spreading factor %d: %s\r\n", sf, api.lorawan.psf.set(sf) ? "Success" : "Fail");
Serial.printf("Set P2P mode bandwidth %d: %s\r\n", bw, api.lorawan.pbw.set(bw) ? "Success" : "Fail");
Serial.printf("Set P2P mode code rate 4/%d: %s\r\n", (cr + 5), api.lorawan.pcr.set(0) ? "Success" : "Fail");
Serial.printf("Set P2P mode preamble length %d: %s\r\n", preamble, api.lorawan.ppl.set(8) ? "Success" : "Fail");
Serial.printf("Set P2P mode tx power %d: %s\r\n", txPower, api.lorawan.ptp.set(22) ? "Success" : "Fail");
api.lorawan.registerPRecvCallback(recv_cb);
api.lorawan.registerPSendCallback(send_cb);
Serial.printf("P2P set Rx mode %s\r\n", api.lorawan.precv(3000) ? "Success" : "Fail");
// let's kick-start things by waiting 3 seconds.
}
void loop() {
uint8_t payload[] = "payload";
bool send_result = false;
if (rx_done) {
rx_done = false;
while (!send_result) {
delay(1000);
Serial.printf("Set P2P to Tx mode %s\r\n", api.lorawan.precv(0) ? "Success" : "Fail");
send_result = api.lorawan.psend(sizeof(payload), payload);
Serial.printf("P2P send %s\r\n", send_result ? "Success" : "Fail");
}
}
delay(500);
}