Is there Modbus Master library worked with RAK3172 with RUI version RUI_4.1.0_RAK3172-E?
I just want to read the holding register from Modbus device. Thanks.
RUI3 examples including ModBus. Tested on RAK3172.
It is using a slightly changed MODbus library. The files are within the source code in RUI3_ModbusRtu.cpp and RUI3_ModbusRtu.h
1 Like
Ahh, yes, sorry.
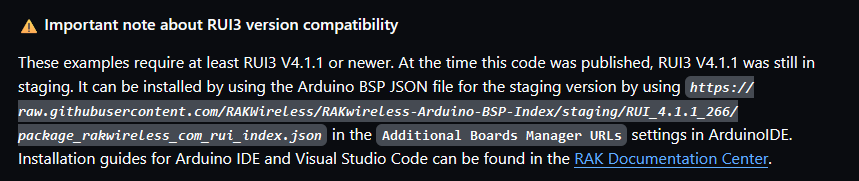
The code is for a staging version of RUI3. The LoRa API calls were moved to its own class.
For LoRa P2P api.lora.xxx the old calls were api.lorawan.xxx before. So if you are on RUI3 4.1.0 or older you have to rename them back.
Same for the callbacks, api.lora.registerPxxxx were api.lorawan.registerPxxx.
Then it should compile.
1 Like
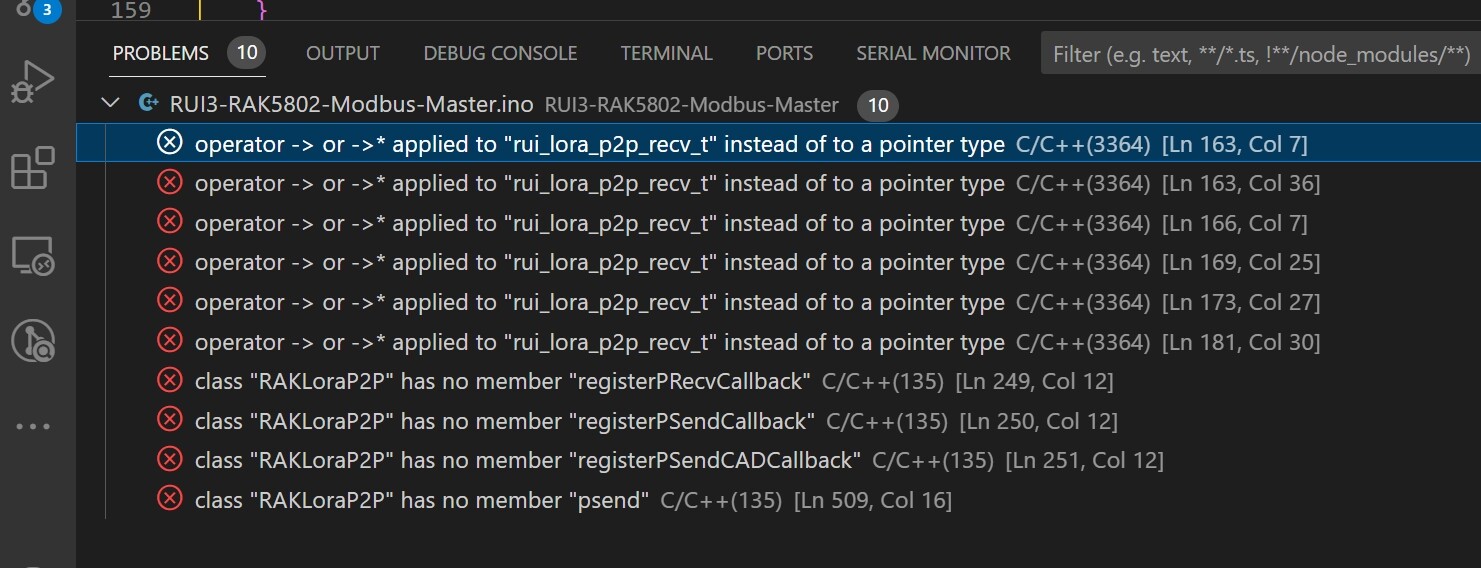
Thanks, It’s better but remain 6 errors.
Here is my code.
/**
* @file main.cpp
* @author Bernd Giesecke ([email protected])
* @brief Modbus Master reading data from environment sensors
* @version 0.1
* @date 2024-01-17
*
* @copyright Copyright (c) 2024
*
*/
#include "app.h"
/** Data array for modbus 16 coils at index 0 and registers at index 1 to 4 */
union coils_n_regs_u coils_n_regs = {0, 0, 0, 0, 0};
/**
* Modbus object declaration
* u8id : node id = 0 for master, = 1..247 for slave
* port : serial port
* u8txenpin : 0 for RS-232 and USB-FTDI
* or any pin number > 1 for RS-485
*/
Modbus master(0, Serial1, 0); // this is master and RS-232 or USB-FTDI
/** This is an structure which contains a query to an slave device */
modbus_t telegram;
/** This is the structure which contains a write to set/reset coils */
struct coil_s
{
int8_t dev_addr = 1;
int8_t coils[16];
int8_t num_coils = 0;
};
/** Coils structure */
coil_s coil_data;
/** Packet is confirmed/unconfirmed (Set with AT commands) */
bool g_confirmed_mode = false;
/** If confirmed packet, number or retries (Set with AT commands) */
uint8_t g_confirmed_retry = 0;
/** Data rate (Set with AT commands) */
uint8_t g_data_rate = 3;
/** fPort to send packages */
uint8_t set_fPort = 2;
/** Payload buffer */
WisCayenne g_solution_data(255);
/**
* @brief Callback after join request cycle
*
* @param status Join result
*/
void joinCallback(int32_t status)
{
if (status != 0)
{
MYLOG("JOIN-CB", "LoRaWan OTAA - join fail! \r\n");
// To be checked if this makes sense
// api.lorawan.join();
}
else
{
MYLOG("JOIN-CB", "LoRaWan OTAA - joined! \r\n");
digitalWrite(LED_BLUE, LOW);
}
}
/**
* @brief LoRaWAN callback after packet was received
*
* @param data pointer to structure with the received data
*/
void receiveCallback(SERVICE_LORA_RECEIVE_T *data)
{
MYLOG("RX-CB", "RX, port %d, DR %d, RSSI %d, SNR %d", data->Port, data->RxDatarate, data->Rssi, data->Snr);
for (int i = 0; i < data->BufferSize; i++)
{
Serial.printf("%02X", data->Buffer[i]);
}
Serial.print("\r\n");
// Check for command fPort
if (data->Port == 0)
{
MYLOG("RX-CB", "MAC command");
return;
}
// Check for valid command sequence
if ((data->Buffer[0] == 0xAA) && (data->Buffer[1] == 0x55))
{
// Check for command (only MB_FC_WRITE_MULTIPLE_COILS supported atm)
if (data->Buffer[2] == MB_FC_WRITE_MULTIPLE_COILS)
{
// Get slave address
coil_data.dev_addr = data->Buffer[3];
if ((coil_data.dev_addr > 0) && (coil_data.dev_addr < 17))
{
// Get number of coils
coil_data.num_coils = data->Buffer[4];
// Check for coil number in range (1 to 16)
if ((coil_data.num_coils > 0) && (coil_data.num_coils < 17))
{
// Save coil status
for (int idx = 0; idx < coil_data.num_coils; idx++)
{
coil_data.coils[idx] = data->Buffer[5 + idx];
}
// Start a timer to handle the incoming coil write request.
api.system.timer.start(RAK_TIMER_1, 100, NULL);
}
else
{
MYLOG("RX_CB", "Wrong num of coils");
}
}
else
{
MYLOG("RX_CB", "invalid slave address");
}
}
else
{
MYLOG("RX_CB", "Wrong command");
}
}
else
{
MYLOG("RX_CB", "Wrong format");
}
}
/**
* @brief LoRaWAN callback after TX is finished
*
* @param status TX status
*/
void sendCallback(int32_t status)
{
MYLOG("TX-CB", "TX status %d", status);
digitalWrite(LED_BLUE, LOW);
}
/**
* @brief LoRa P2P callback if a packet was received
*
* @param data pointer to the data with the received data
*/
void recv_cb(rui_lora_p2p_recv_t data)
{
MYLOG("RX-P2P-CB", "P2P RX, RSSI %d, SNR %d", data.Rssi, data.Snr);
for (int i = 0; i < data.BufferSize; i++)
{
Serial.printf("%02X", data.Buffer[i]);
}
Serial.print("\r\n");
// Check for valid command sequence
if ((data->Buffer[0] == 0xAA) && (data->Buffer[1] == 0x55))
{
// Check for command (only MB_FC_WRITE_MULTIPLE_COILS supported atm)
if (data->Buffer[2] == MB_FC_WRITE_MULTIPLE_COILS)
{
// Get slave address
coil_data.dev_addr = data->Buffer[3];
if ((coil_data.dev_addr > 0) && (coil_data.dev_addr < 17))
{
// Get number of coils
coil_data.num_coils = data->Buffer[4];
// Check for coil number in range (1 to 16)
if ((coil_data.num_coils > 0) && (coil_data.num_coils < 17))
{
// Save coil status
for (int idx = 0; idx < coil_data.num_coils; idx++)
{
coil_data.coils[idx] = data->Buffer[5 + idx];
}
// Start a timer to handle the incoming coil write request.
api.system.timer.start(RAK_TIMER_1, 100, NULL);
}
else
{
MYLOG("RX_CB", "Wrong num of coils");
}
}
else
{
MYLOG("RX_CB", "invalid slave address");
}
}
else
{
MYLOG("RX_CB", "Wrong command");
}
}
else
{
MYLOG("RX_CB", "Wrong format");
}
}
/**
* @brief LoRa P2P callback if a packet was sent
*
*/
void send_cb(void)
{
MYLOG("TX-P2P-CB", "P2P TX finished");
digitalWrite(LED_BLUE, LOW);
}
/**
* @brief LoRa P2P callback for CAD result
*
* @param result true if activity was detected, false if no activity was detected
*/
void cad_cb(bool result)
{
MYLOG("CAD-P2P-CB", "P2P CAD reports %s", result ? "activity" : "no activity");
}
/**
* @brief Arduino setup, called once after reboot/power-up
*
*/
void setup()
{
// Setup for LoRaWAN
if (api.lorawan.nwm.get() == 1)
{
g_confirmed_mode = api.lorawan.cfm.get();
g_confirmed_retry = api.lorawan.rety.get();
g_data_rate = api.lorawan.dr.get();
// Setup the callbacks for joined and send finished
api.lorawan.registerRecvCallback(receiveCallback);
api.lorawan.registerSendCallback(sendCallback);
api.lorawan.registerJoinCallback(joinCallback);
}
else // Setup for LoRa P2P
{
api.lorawan.registerPRecvCallback(recv_cb);
api.lorawan.registerPSendCallback(send_cb);
api.lorawan.registerPSendCADCallback(cad_cb);
}
pinMode(LED_GREEN, OUTPUT);
digitalWrite(LED_GREEN, HIGH);
pinMode(LED_BLUE, OUTPUT);
digitalWrite(LED_BLUE, HIGH);
Serial.begin(115200);
// Delay for 5 seconds to give the chance for AT+BOOT
delay(5000);
api.system.firmwareVersion.set("RUI3-ModBus-Master-V1.0.0");
Serial.println("RAKwireless RUI3 Node");
Serial.println("------------------------------------------------------");
Serial.println("Setup the device with WisToolBox or AT commands before using it");
Serial.printf("Ver %s\n", api.system.firmwareVersion.get().c_str());
Serial.println("------------------------------------------------------");
// Register the custom AT command to get device status
if (!init_status_at())
{
MYLOG("SETUP", "Add custom AT command STATUS fail");
}
// Register the custom AT command to set the send interval
if (!init_interval_at())
{
MYLOG("SETUP", "Add custom AT command Send Interval fail");
}
// Get saved sending interval from flash
get_at_setting();
digitalWrite(LED_GREEN, LOW);
// Initialize the Modbus interface on Serial1 (connected to RAK5802 RS485 module)
pinMode(WB_IO2, OUTPUT);
digitalWrite(WB_IO2, HIGH);
Serial1.begin(19200); // baud-rate at 19200
master.start();
master.setTimeOut(2000); // if there is no answer in 2000 ms, roll over
// Create a timer for interval reading of sensor from Modbus slave.
api.system.timer.create(RAK_TIMER_0, modbus_read_register, RAK_TIMER_PERIODIC);
// Start a timer.
api.system.timer.start(RAK_TIMER_0, custom_parameters.send_interval, NULL);
// Create a timer for handling downlink write request to Modbus slave.
api.system.timer.create(RAK_TIMER_1, modbus_write_coil, RAK_TIMER_ONESHOT);
// Check if it is LoRa P2P
if (api.lorawan.nwm.get() == 0)
{
digitalWrite(LED_BLUE, LOW);
modbus_read_register(NULL);
}
if (api.lorawan.nwm.get() == 1)
{
if (g_confirmed_mode)
{
MYLOG("SETUP", "Confirmed enabled");
}
else
{
MYLOG("SETUP", "Confirmed disabled");
}
MYLOG("SETUP", "Retry = %d", g_confirmed_retry);
MYLOG("SETUP", "DR = %d", g_data_rate);
}
// Enable low power mode
api.system.lpm.set(1);
// If available, enable BLE advertising for 30 seconds and open the BLE UART channel
#if defined(_VARIANT_RAK3172_) || defined(_VARIANT_RAK3172_SIP_)
// No BLE
#else
Serial6.begin(115200, RAK_AT_MODE);
api.ble.advertise.start(30);
#endif
digitalWrite(WB_IO2, LOW);
}
void modbus_read_register(void *)
{
digitalWrite(WB_IO2, HIGH);
MYLOG("MODR", "Send read request over ModBus");
coils_n_regs.data[1] = coils_n_regs.data[2] = coils_n_regs.data[3] = coils_n_regs.data[4] = 0;
telegram.u8id = 1; // slave address
telegram.u8fct = MB_FC_READ_REGISTERS; // function code (this one is registers read)
telegram.u16RegAdd = 0; // start address in slave
telegram.u16CoilsNo = 5; // number of elements (coils or registers) to read
telegram.au16reg = coils_n_regs.data; // pointer to a memory array in the Arduino
master.query(telegram); // send query (only once)
time_t start_poll = millis();
bool data_ready = false;
while ((millis() - start_poll) < 5000)
{
master.poll(); // check incoming messages
if (master.getState() == COM_IDLE)
{
if ((coils_n_regs.data[1] == 0) && (coils_n_regs.data[2] == 0) && (coils_n_regs.data[3] == 0) && (coils_n_regs.data[4] == 0))
{
MYLOG("MODR", "No data received");
break;
}
else
{
MYLOG("MODR", "Temperature = %.2f", coils_n_regs.sensor_data.temperature / 100.0);
MYLOG("MODR", "Humidity = %.2f", coils_n_regs.sensor_data.humidity / 100.0);
MYLOG("MODR", "Barometer = %.1f", coils_n_regs.sensor_data.pressure / 10.0);
MYLOG("MODR", "Battery = %.2f", coils_n_regs.sensor_data.battery / 100.0);
data_ready = true;
// Clear payload
g_solution_data.reset();
if (coils_n_regs.sensor_data.temperature != 0)
{
g_solution_data.addTemperature(LPP_CHANNEL_TEMP, coils_n_regs.sensor_data.temperature / 100.0);
}
if (coils_n_regs.sensor_data.humidity != 0)
{
g_solution_data.addRelativeHumidity(LPP_CHANNEL_HUMID, coils_n_regs.sensor_data.humidity / 100.0);
}
if (coils_n_regs.sensor_data.pressure != 0)
{
g_solution_data.addBarometricPressure(LPP_CHANNEL_PRESS, coils_n_regs.sensor_data.pressure / 10.0);
}
if (coils_n_regs.sensor_data.battery != 0)
{
g_solution_data.addVoltage(LPP_CHANNEL_TEMP, coils_n_regs.sensor_data.battery / 100.0);
}
float battery_reading = 0.0;
// Add battery voltage
for (int i = 0; i < 10; i++)
{
battery_reading += api.system.bat.get(); // get battery voltage
}
battery_reading = battery_reading / 10;
g_solution_data.addVoltage(LPP_CHANNEL_BATT, battery_reading);
break;
}
}
}
if (data_ready)
{
// Send the packet
send_packet();
}
digitalWrite(WB_IO2, LOW);
}
void modbus_write_coil(void *)
{
// Coils are in 16 bit register in form of 7-0, 15-8
digitalWrite(WB_IO2, HIGH);
MYLOG("MODW", "Send write coil request over ModBus");
MYLOG("MODW", "Num of coils %d", coil_data.num_coils);
// Reset the register
coils_n_regs.data[0] = 0;
// Prepare coils STATUS
uint8_t coil_shift = 8;
for (int idx = 0; idx < coil_data.num_coils; idx++)
{
MYLOG("MODW", "Coil %d %s %d", idx, coil_data.coils[idx] == 0 ? "off" : "on", coil_data.coils[idx] << coil_shift);
coils_n_regs.data[0] |= coil_data.coils[idx] << coil_shift;
MYLOG("MODW", "Coil data %02X", coils_n_regs.data[0]);
coil_shift++;
if (coil_shift == 16)
{
coil_shift = 0;
}
}
MYLOG("MODW", "Coil data %02X", coils_n_regs.data[0]);
telegram.u8id = coil_data.dev_addr; // slave address
telegram.u8fct = MB_FC_WRITE_MULTIPLE_COILS; // function code (this one is coil write)
telegram.u16RegAdd = 0; // start address in slave
telegram.u16CoilsNo = coil_data.num_coils; // number of elements (coils or registers) to write
telegram.au16reg = coils_n_regs.data; // pointer to a memory array in the Arduino
master.query(telegram); // send query (only once)
time_t start_poll = millis();
while ((millis() - start_poll) < 5000)
{
master.poll(); // check incoming messages
if (master.getState() == COM_IDLE)
{
MYLOG("MODW", "Write done");
break;
}
}
digitalWrite(WB_IO2, LOW);
}
/**
* @brief This example is complete timer driven.
* The loop() does nothing than sleep.
*
*/
void loop(void)
{
api.system.sleep.all();
}
/**
* @brief Send the data packet that was prepared in
* Cayenne LPP format by the different sensor and location
* aqcuision functions
*
*/
void send_packet(void)
{
// Check if it is LoRaWAN
if (api.lorawan.nwm.get() == 1)
{
MYLOG("UPLINK", "Sending packet over LoRaWAN");
// Send the packet
if (api.lorawan.send(g_solution_data.getSize(), g_solution_data.getBuffer(), set_fPort, g_confirmed_mode, g_confirmed_retry))
{
MYLOG("UPLINK", "Packet enqueued, size %d", g_solution_data.getSize());
}
else
{
MYLOG("UPLINK", "Send failed");
}
}
// It is P2P
else
{
MYLOG("UPLINK", "Send packet with size %d over P2P", g_solution_data.getSize());
digitalWrite(LED_BLUE, LOW);
if (api.lorawan.psend(g_solution_data.getSize(), g_solution_data.getBuffer(), true))
{
MYLOG("UPLINK", "Packet enqueued");
}
else
{
MYLOG("UPLINK", "Send failed");
}
}
}
Hmmm, I have to check the repo, last time I tried it compiled.
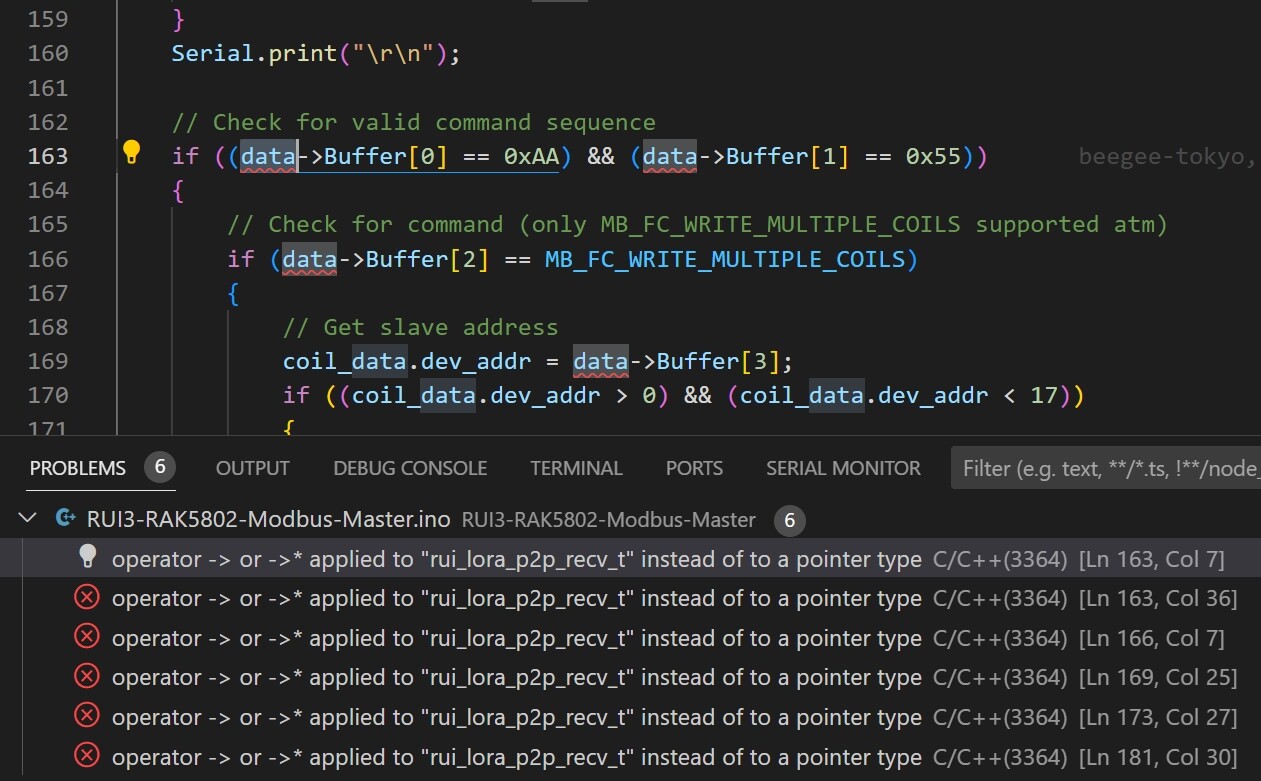
In void recv_cb(rui_lora_p2p_recv_t data) replace all data->Buffer[ with data.Buffer, replacing the → with a dot.
1 Like
Thank, I’ve replace → with a dot, But I’ve got errors:
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp: In function 'int status_handler(SERIAL_PORT, char*, stParam*)':
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:205:41: error: 'class RAKLoraP2P' has no member named 'pfreq'
205 | AT_PRINTF("Frequency = %d", api.lora.pfreq.get());
| ^~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:206:34: error: 'class RAKLoraP2P' has no member named 'psf'
206 | AT_PRINTF("SF = %d", api.lora.psf.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:207:34: error: 'class RAKLoraP2P' has no member named 'pbw'
207 | AT_PRINTF("BW = %d", api.lora.pbw.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:208:34: error: 'class RAKLoraP2P' has no member named 'pcr'
208 | AT_PRINTF("CR = %d", api.lora.pcr.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:209:47: error: 'class RAKLoraP2P' has no member named 'ppl'
209 | AT_PRINTF("Preamble length = %d", api.lora.ppl.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:210:40: error: 'class RAKLoraP2P' has no member named 'ptp'
210 | AT_PRINTF("TX power = %d", api.lora.ptp.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:214:41: error: 'class RAKLoraP2P' has no member named 'pfreq'
214 | AT_PRINTF("Frequency = %d", api.lora.pfreq.get());
| ^~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:215:39: error: 'class RAKLoraP2P' has no member named 'pbr'
215 | AT_PRINTF("Bitrate = %d", api.lora.pbr.get());
| ^~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:216:40: error: 'class RAKLoraP2P' has no member named 'pfdev'
216 | AT_PRINTF("Deviaton = %d", api.lora.pfdev.get());
| ^~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
Multiple libraries were found for "ArduinoJson.h"
Used: C:\Users\anusorn\Documents\Arduino\libraries\ArduinoJson
Not used: C:\Users\anusorn\Documents\Arduino\libraries\ArduinoJson-6.x
Error during build: exit status 1
IntelliSense configuration already up to date. To manually rebuild your IntelliSense configuration run "Ctrl+Alt+I"
[Error] Uploading sketch 'RUI3-RAK5802-Modbus-Master\RUI3-RAK5802-Modbus-Master.ino': Exit with code=1
1 Like
Thanks, I’ve replace, but still get these errors:
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp: In function 'int status_handler(SERIAL_PORT, char*, stParam*)':
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:205:50: error: no match for call to '(RAKLorawan::pfreq) ()'
205 | AT_PRINTF("Frequency = %d", api.lorawan.pfreq());
| ^
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:214:50: error: no match for call to '(RAKLorawan::pfreq) ()'
214 | AT_PRINTF("Frequency = %d", api.lorawan.pfreq());
| ^
D:\STM32\RUI3\RUI3-Best-Practice\ModBus\RUI3-RAK5802-Modbus-Master\custom_at.cpp:17:17: note: in definition of macro 'AT_PRINTF'
17 | Serial.printf(__VA_ARGS__); \
| ^~~~~~~~~~~
Hi beegee:
Now I’ve fixed errors, But I’ve to reconfig GPIO to match with RAK3172 Wisduo, Please advise me. Thank for advance.
I have 3 LED on PB2, PA10 and PA1. and connect modbus device on UART1.
UART1 would be Serial1 in the Arduino code.
For the LED’s you do the usual
pinMode(PB2, OUTPUT);
digitalWrite(PB2,HIGH); // GPIO high
For the GPIO’s we have pre-assigned names in the variant.h of the Arduino BSP, you can directly use PB2, PA10 and PA1
1 Like
Hi beegee, Thanks for your advise. I can use GPIO as I expect.
Now, I have issue about upload code; every time I uploaded my custom code, I can’t re-upload again until using ST-LINK to erase and upload official AT Command firmware then re-upload my custom code. I guess it about low power mode, how do I temporary disable it?, just for developing time.
Try AT+LPM=0 or api.system.lpm.set(0);
But I doubt it is the LPM, I have that enabled all the time and I have no problems uploading firmware.
I am using WisBlock modules, not bare RAK3172 or RAK3172 Breakout Boards.
The WisBlock module has a CH340 UART-USB converter onboard.
1 Like
This topic was automatically closed 10 days after the last reply. New replies are no longer allowed.