Are you sure as the TTN console is not Cayenne. Cayenne will only use the LPP data forwarded from TTN server.
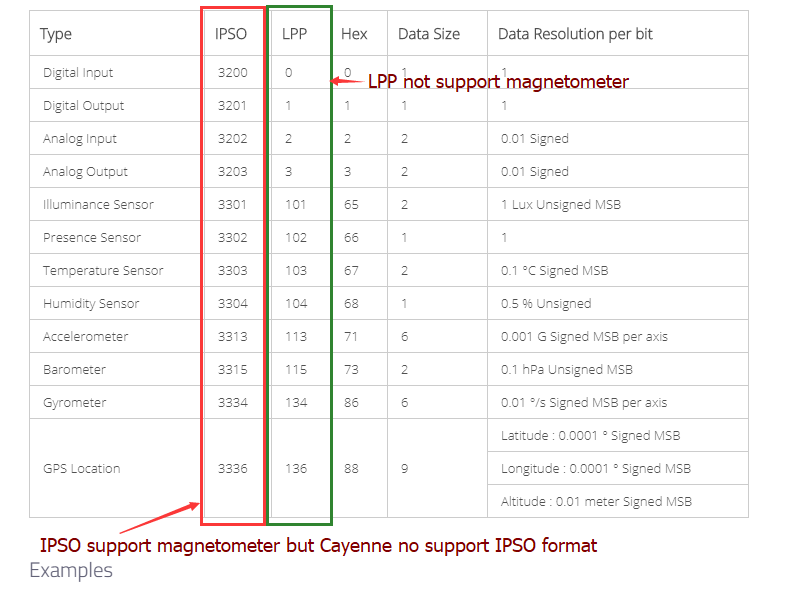
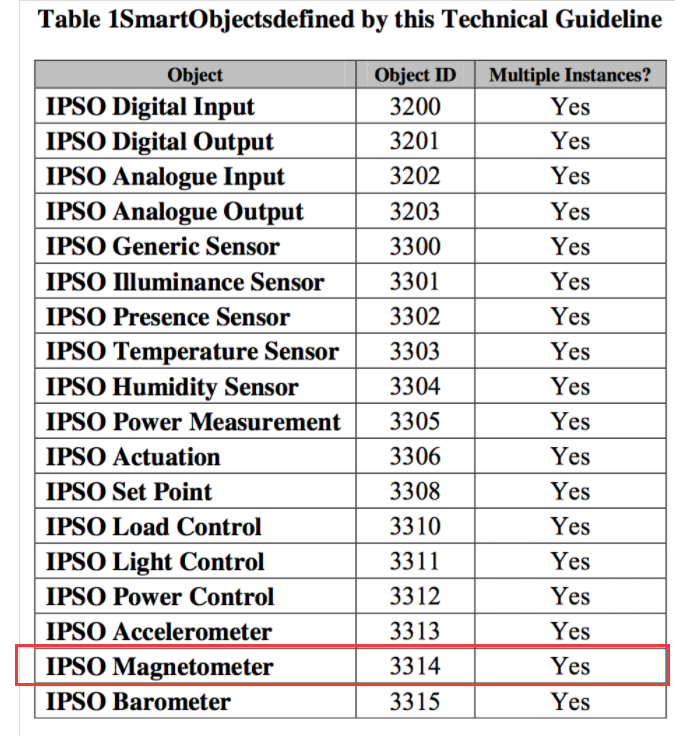
First LPP need to support it, I’ll investigate and get back to you asap.
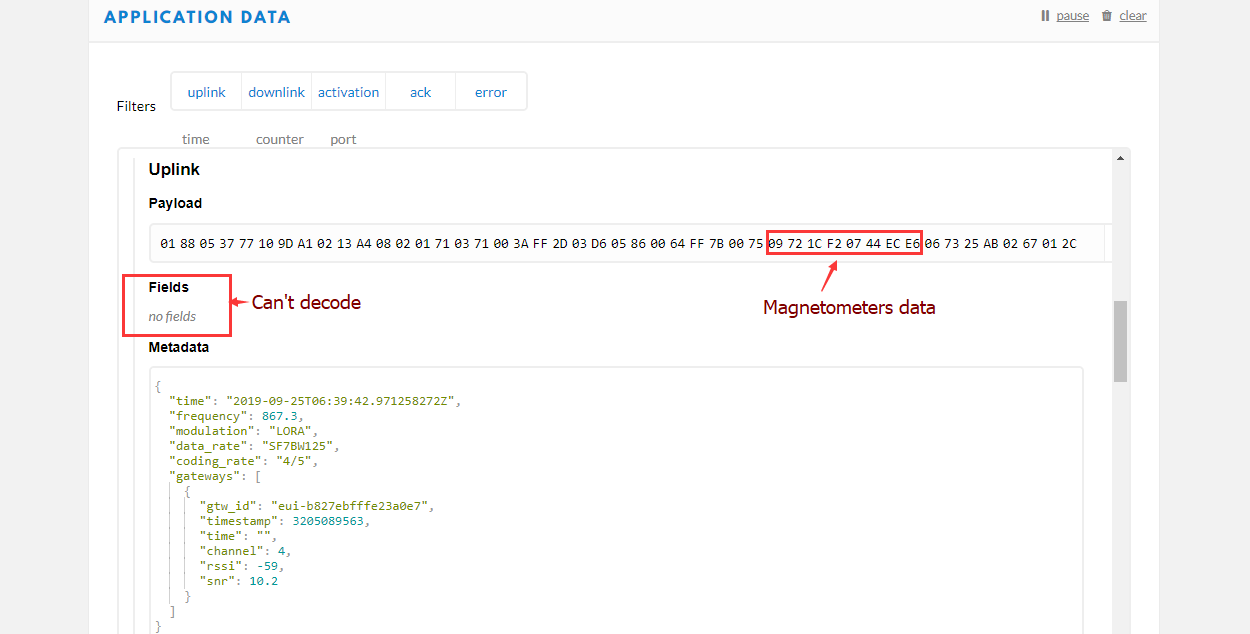
Below the device status in Serial Port Tool with your latest firmware:
version 3.1.0.7.T2 (T2, not T3 as .bin filename)
LPS22HD sensor is closed or not found
The MPU9250 sensor (indoor and stable on my desktop):
Acceleration(g) of X,Y,Z: 0.02,0.07,0.99
Gyro(degress/s) of X,Y,Z: -1.61,0.45,0.71
Magnetometer(uT) of X,Y,Z: 28.65,52.95,55.05
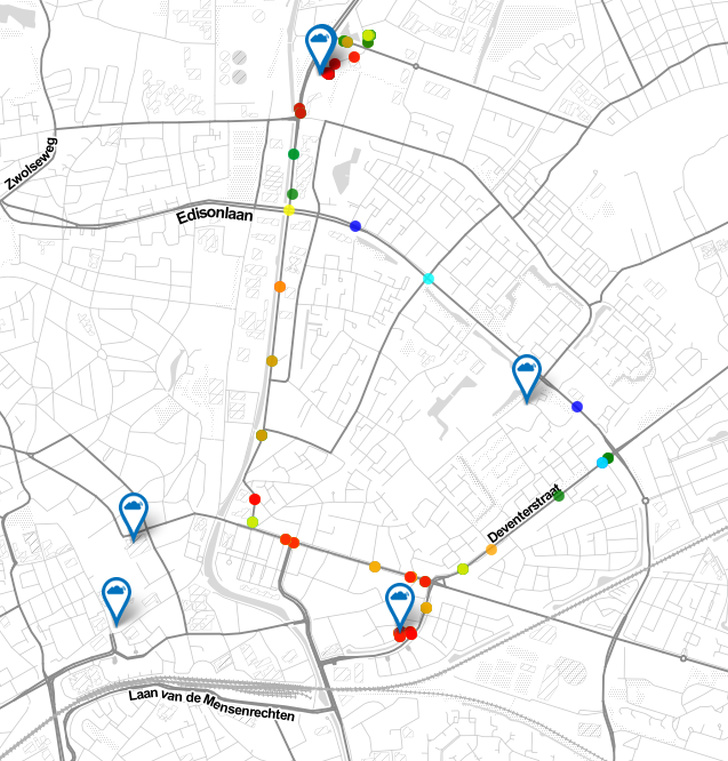
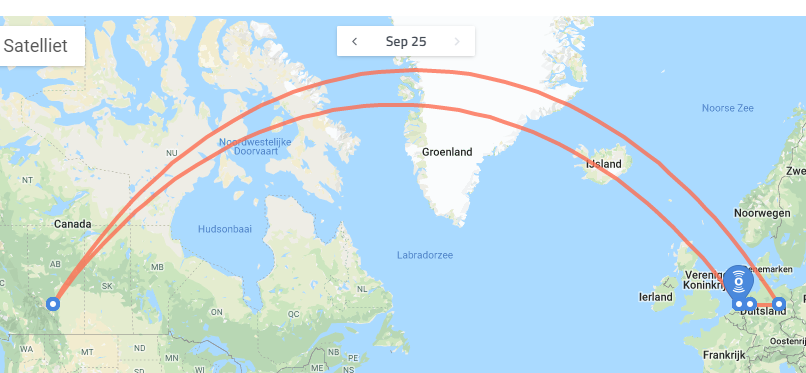
The indoor GPS position is accurate (The Netherlands) and pretty constant over time. Altitude value is constant but wrong, this is a common problem with all GPS modules I have tested so far.
One nit is that V3.1.0.7.T3 identifies as T2 in at+version.
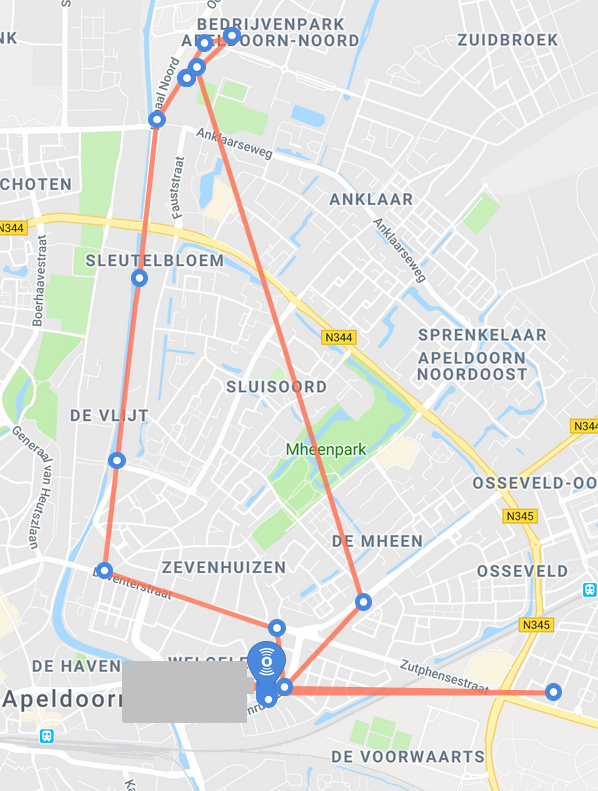
The GPS data is now reporting and correct.
A feature request would be a GPS tracking mode where the device would send a packet every X seconds if the GPS position has not changed more than a given distance. If it did change it would send a packet every Y seconds. This would be useful when trying to provide data to ttnmapper.org.
I would envision sending a packet every 600 seconds unless the position changes, then send every minute. That won’t be much different than sending a packet once a minute.
Sending a position every 5 minutes if you are not moving vs every minute if you are not shouldn’t be significanly different change over sending a position every minute.
…or make it AT configurable as it depens how you want to use the tracker.
I do not need an update if there is no movement but like to have it in 30 min to know if the tracker is alive and to know the battery status.







 Thanks!
Thanks!